% theta d a alpha offset
L1=Link([ 0 0 0 -pi/2 0 ],'standard'); %连杆的D-H参数
L2=Link([ 0 0 0.4318 0 0 ],'standard');
L3=Link([ 0 0.1501 0.0203 pi/2 0 ],'standard');
L4=Link([ 0 0.4318 0 -pi/2 0 ],'standard');
L5=Link([ 0 0 0 pi/2 0 ],'standard');
L6=Link([ 0 0 0 0 0 ],'standard');
3. 实验主要内容
| 连杆 |
θ
i
\theta_{i}
θi? |
d
d
d |
a
a
a |
α
\alpha
α |
|---|
| 1 |
θ
1
\theta_{1}
θ1? | 0 | 0 | -90 |
| 2 |
θ
2
\theta_{2}
θ2? | 149.09mm | 431.8mm | 0 |
| 3 |
θ
3
\theta_{3}
θ3? | 0 | -20.32mm | 90 |
| 4 |
θ
4
\theta_{4}
θ4? | 433.07mm | 0 | -90 |
| 5 |
θ
5
\theta_{5}
θ5? | 0 | 0 | 90 |
| 6 |
θ
6
\theta_{6}
θ6? | 56.25mm | 0 | 0 |
4. 实验结果和分析
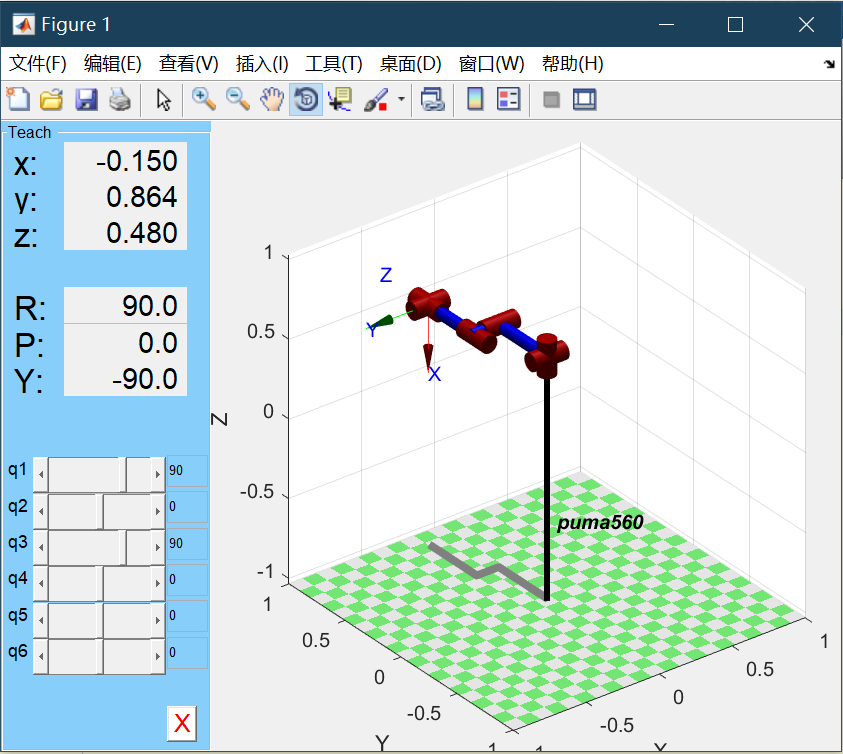
4.1 正运动学求解
例1
θ
=
[
π
2
,
0
,
π
2
,
0
,
0
,
0
]
\theta=[\frac{\pi}{2},0,\frac{\pi}{2},0,0,0]
θ=[2π?,0,2π?,0,0,0]
>> theta=[pi/2 0 pi/2 0 0 0];
>> T=robot.fkine(theta)
T =
0 -1 0 -0.1501
0 0 1 0.8636
-1 0 0 0.4797
0 0 0 1
例2
θ
=
[
?
π
2
,
0
,
?
π
2
,
0
,
0
,
0
]
\theta=[-\frac{\pi}{2},0,-\frac{\pi}{2},0,0,0]
θ=[?2π?,0,?2π?,0,0,0]
>> theta=[-pi/2 0 -pi/2 0 0 0];
>> T=robot.fkine(theta)
T =
0 1 0 0.1501
0 0 1 0
1 0 0 0.5203