当前位置 博文首页 > 【欢迎关注,一起学习,共同进步!】:【自动控制原理】知识点
【欢迎关注,一起学习,共同进步!】:【自动控制原理】知识点
作者:[db:作者]
时间:2021-08-12 17:56
| |
|---|
| 恒值调节系统 | 随动系统 |
| 线性系统 | 非线性系统 |
| 定常系统 | 时变系统 |
| 连续系统 | 离散系统 |
| 集中参数系统 | 分布参数系统 |
- 改善二阶系统动态性能的措施:
- 测速反馈 ―― 增加阻尼
- 比例+微分 ―― 提前控制
- 校正装置的意义:
- 不同控制系统对性能指标的要求有不同侧重,如:
- 系统校正的根轨迹法:
| 增加极点 | 增加零点 | 增加原点附近的开环偶极子 |
|---|
| 根轨迹 | 右移 | 左移 | |
| 系统相对稳定性 | 降低 | 增加 | |
| 系统响应的调节时间 | 增加 | 减小 | |
| 解释 | | 时域解释:PD控制 | 根轨迹解释: 模条件和相角条件的相互抵消性 |
- 偶极子是指开环系统中相距很近(和其它零极点相比)的一对极点和零点。
- 偶极子对系统的稳定性和动态性能几乎没有影响
- 在原点附近增加开环偶极子,可提高系统的开环增益,改善静态性能。
- 相对稳定性:在时域分析中,常常以实部最大的特征根和虚轴之间的距离
σ
\sigma
σ 表示系统的相对稳定性和稳定裕度。若系统的全部特征根都在垂线
X
=
?
σ
X=-\sigma
X=?σ 的左边,则称该系统具有
σ
\sigma
σ 的稳定裕度。
- 闭环主导极点:在高阶系统中,如果存在一对离虚轴最近的共轭复数极点且周围没有零点,其他闭环极点与虚轴间的距离比起这一对共轭复数极点与虚轴间的距离大五倍以上,则这一对共轭复数极点在系统响应输出中对应函数项的衰减最慢且系数很大。
- 在输出响应中,那些系数大而且衰减慢的函数项在瞬态过程中将起主要作用。对于高阶系统而言,如果存在一对离虚轴最近的共轭复数极点且周围没有零点,且他闭环极点与虚轴之间的距离远大于这一对共轭复数极点与虚轴之间的距离(大5倍以上),则这一对共轭复数极点在
c
(
t
)
c(t)
c(t) 中对应的函数项衰减的最慢且系数相对很大。因此,它们对高阶系统的瞬态响应起主要作用,系统的单位阶跃响应形式和瞬态性能指标主要由它们决定。这一对共轭复数极点就称为闭环主导极点。具有闭环主导极点的高阶系统可近似为二阶系统。(课本p240)
- 高阶系统的单位阶跃响应取决于闭环系统的零、极的分布情况。(课本p239)
- 最小相位系统的对数幅频特性与对数相频特性具有一一对应关系,即对于给定的对数幅频特性只有唯一的对数相频特性与之相对应。
- 而非最小相位系统,对于给定的幅频特性,与之对应的相频特性却不是唯一的。
- 因此,对于最小相位系统,只要知道其对数幅频特性,就可以唯一地写出其传递函数;
- 而对于非最小相位系统,则必须在对数幅频特性和对数相频特性都已知时,才可以确定其传递函数。
-由于最小相位系统具有上述特性,在利用 Bode 图进行系统分析时,只需要画出它地对数幅特性就够了。
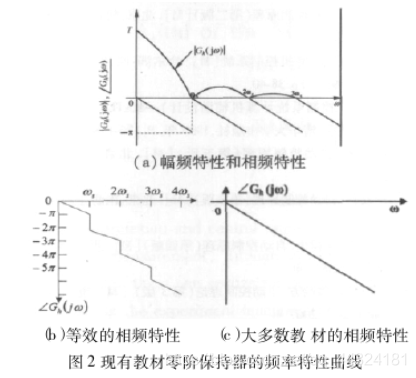
- 保持器
- 将离散信号转换为连续信号的过程称为信号的恢复,该过程是靠保持器实现的。
- 从频谱分析的角度而言,保持器的作用正是一个低通滤波器,它通过在低频打开一个适当的窗口,从采样脉冲信号的频谱中截取原连续信号的频谱。
- 零阶保持器(ZOH)
- 其脉冲响应函数为:
g
h
(
t
)
=
1
(
t
)
?
1
(
t
?
T
)
g_{h}(t)=1(t)-1(t-T)
gh?(t)=1(t)?1(t?T)
- 其中,T 取为采样脉冲信号的周期。
- 传递函数为:
G
h
(
s
)
=
1
s
(
1
?
e
T
s
)
G_{h}(s)=\frac{1}{s}(1-e^{Ts})
Gh?(s)=s1?(1?eTs)
- 具有相位滞后特性。
- PD控制是一种超前控制,不改变系统的自然频率,但可以增大系统的阻尼比。
- 增大PD控制器的增益 K1 ,可以在不影响系统稳定性的前提下,减少对加速度信号的跟踪误差。
- 积分控制器消除了由阶跃扰动造成的稳态误差,使系统成为了对阶跃扰动无差的系统。
- 为了改善系统性能,可以在不改变 K 的情况下,采用附加速度反馈(即微分反馈)使阻尼系数提高。
- 无差系统:稳态误差为 0 的系统;
- 有差系统:稳态误差为非零有限值的系统。
- 静差:系统在阶跃输入作用下的稳态误差;
- 有(静)差系统或零阶无差度系统:0型系统;
- 一阶无差度系统:Ⅰ 型系统;
- 二阶无差度系统:Ⅱ 型系统。
- 为减小或消除系统系统在给定输入信号和扰动信号作用下的稳态误差,可以采用以下措施:
- 增大系统开环增益或扰动作用点之前系统的前向通道增;
- 在系统的前向通道或主反馈通道设置串联积分环节。
- 注:在反馈控制系统中,增大开环增益或设置串联积分环节以消除或减小稳态误差的措施,必然导致系统稳定性的降低,甚至造成系统的不稳定,从而恶化系统的瞬态性能。
- 频率特性的低频段表征了系统的稳态性能,中频段表征了系统的瞬态性能,而高频段则反映了系统的抗干扰的能力。
cs