目录
- 前言
- 1. 效果图
- 2. 原理
- 2.1 什么是光流?光流追踪的前提、原理
- 2.2 光流的应用
- 2.3 光流的2种方法
- 3. 源码
- 3.2 稀疏光流追踪
- 3.2 优化版稀疏光流追踪
- 3.3 密集光流追踪
- 总结
前言
这篇博客将介绍光流的概念以及如何使用 Lucas-Kanade 方法估计光流,并演示如何使用 cv2.calcOpticalFlowPyrLK() 来跟踪视频中的特征点。
1. 效果图
光流追踪效果图如下:
它显示了一个球在连续 5 帧中移动。箭头表示其位移矢量。

不是很严谨的――稀疏光流特征点追踪效果图如下:
它追踪了视频中多个车的主驾驶、副驾驶,以及行人的边缘角点的轨迹:
此代码不检查下一个关键点的正确程度。因此即使图像中的任何特征点消失,光流也有可能找到下一个看起来可能靠近它的点。对于稳健的跟踪,角点应该在特定的时间间隔内检测点。

过程图其一如下:

优化版的――稀疏光流特征点追踪效果如下:
找到特征点,每 30 帧对光流点向后检查,只保留还存在于屏幕中的特征点。不会存在如上图车已经过去了,还留存有长长的不正确的轨迹追踪线。

过程图其一如下:

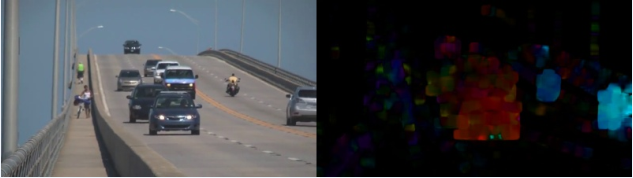
原图 VS 密集光流追踪 gif 效果图如下:

原图 VS 密集光流Hsv效果图其一如下:
2. 原理
2.1 什么是光流?光流追踪的前提、原理
光流是由物体或相机的运动引起的图像物体在连续两帧之间的明显运动的模式。它是 2D 矢量场,其中每个矢量是一个位移矢量,显示点从第一帧到第二帧的移动。
光流追踪的前提是:1. 对象的像素强度在连续帧之间不会改变;2. 相邻像素具有相似的运动。
光流追踪的原理:
cv2.goodFeaturesToTrack() :Shi-Tomasi 角点检测器确定要追踪的特征点
cv2.calcOpticalFlowPyrLK(): 追踪视频中的稀疏特征点
cv2.calcOpticalFlowFarneback(): 追踪视频中的密集特征点
取第一帧,检测其中的一些 Shi-Tomasi 角点,使用 Lucas-Kanade 光流迭代跟踪这些点。对于函数 cv2.calcOpticalFlowPyrLK() 传递前一帧、前一个点和下一帧。它返回下一个点以及一些状态编号,如果找到下一个点,则值为 1,否则为零。然后在下一步中迭代地将这些下一个点作为前一个点传递。
使用 Harris 角点检测器 检查逆矩阵的相似性。它表示角点是更好的跟踪点。
Shi-Tomasi 角点检测器 比 Harris 角点检测器效果更好一些;
2.2 光流的应用
光流在以下领域有许多应用:
2.3 光流的2种方法
OpenCV提供了俩种算法计算光流,分别通过:cv2.calcOpticalFlowPyrLK()、cv2.calcOpticalFlowFarneback实现;
- 稀疏光流: 通过 Lucas-Kanade 方法计算稀疏特征集的光流(使用 Shi-Tomasi 算法检测到的角点)。
- 密集光流: 通过 Gunner Farneback 来寻找密集光流。它计算帧中所有点的光流。
稀疏光流计算:
该方法传递前一帧、前一个点和下一帧;
它返回下一个点以及一些状态编号,如果找到下一个点,则值为 1,否则为零。
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, winSize=(15, 15), maxLevel=2, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
- old_gray: 上一帧单通道灰度图
- frame_gray: 下一帧单通道灰度图
- prePts:p0上一帧坐标pts
- nextPts: None
- winSize: 每个金字塔级别上搜索窗口的大小
- maxLevel: 最大金字塔层数
- criteria:指定迭代搜索算法的终止条件,在指定的最大迭代次数 10 之后或搜索窗口移动小于 0.03
密集光流计算:
该方法将得到一个带有光流向量 (u,v) 的 2 通道阵列。可以找到它们的大小和方向,然后对结果进行颜色编码以实现更好的可视化。
在HSV图像中,方向对应于图像的色调,幅度对应于价值平面。
flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)
- prvs: 上一帧单通道灰度图
- next: 下一帧单通道灰度图
- flow: 流 None
- pyr_scale: 0.5经典金字塔,构建金字塔缩放scale
- level:3 初始图像的金字塔层数
- winsize:3 平均窗口大小,数值越大,算法对图像的鲁棒性越强
- iterations:15 迭代次数
- poly_n:5 像素邻域的参数多边形大小,用于在每个像素中找到多项式展开式;较大的值意味着图像将使用更平滑的曲面进行近似,从而产生更高的分辨率、鲁棒算法和更模糊的运动场;通常多边形n=5或7。
- poly_sigma:1.2 高斯标准差,用于平滑导数
- flags: 可以是以下操作标志的组合:OPTFLOW_USE_INITIAL_FLOW:使用输入流作为初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN过滤器而不是相同尺寸的盒过滤器;
3. 源码
3.2 稀疏光流追踪
# 光流追踪
# 光流追踪的前提是:1. 对象的像素强度在连续帧之间不会改变;2. 相邻像素具有相似的运动。
# - cv2.goodFeaturesToTrack() 确定要追踪的特征点
# - cv2.calcOpticalFlowPyrLK() 追踪视频中的特征点
# 取第一帧,检测其中的一些 Shi-Tomasi 角点,使用 Lucas-Kanade 光流迭代跟踪这些点。
# 对于函数 cv2.calcOpticalFlowPyrLK() 传递前一帧、前一个点和下一帧。它返回下一个点以及一些状态编号,如果找到下一个点,则值为 1,否则为零。
# 然后在下一步中迭代地将这些下一个点作为前一个点传递。
# USAGE
# python video_optical_flow.py
import imutils
import numpy as np
import cv2
cap = cv2.VideoCapture('images/slow_traffic_small.mp4')
# ShiTomasi角点检测的参数
feature_params = dict(maxCorners=100,
qualityLevel=0.3,
minDistance=7,
blockSize=7)
# Lucas Kanada光流检测的参数
lk_params = dict(winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# 构建随机颜色
color = np.random.randint(0, 255, (100, 3))
# 获取第一帧并发现角点
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# 为绘制光流追踪图,构建一个Mask
mask = np.zeros_like(old_frame)
num = 0
while (1):
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 使用迭代Lucas Kanade方法计算稀疏特征集的光流
# - old_gray: 上一帧单通道灰度图
# - frame_gray: 下一帧单通道灰度图
# - prePts:p0上一帧坐标pts
# - nextPts: None
# - winSize: 每个金字塔级别上搜索窗口的大小
# - maxLevel: 最大金字塔层数
# - criteria:指定迭代搜索算法的终止条件,在指定的最大迭代次数criteria.maxCount之后或搜索窗口移动小于criteria.epsilon
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# 选择轨迹点
good_new = p1[st == 1]
good_old = p0[st == 1]
# 绘制轨迹
for i, (new, old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel()
c, d = old.ravel()
mask = cv2.line(mask, (a, b), (c, d), color[i].tolist(), 2)
frame = cv2.circle(frame, (a, b), 5, color[i].tolist(), -1)
img = cv2.add(frame, mask)
cv2.imshow('frame', img)
cv2.imwrite('videoof-imgs/' + str(num) + '.jpg', imutils.resize(img, 500))
print(str(num))
num = num + 1
k = cv2.waitKey(30) & 0xff
if k == 27:
break
# 更新之前的帧和点
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1, 1, 2)
cv2.destroyAllWindows()
cap.release()
3.2 优化版稀疏光流追踪
# 优化后的光流追踪―Lucas-Kanade tracker
# (当不见检查下一个关键点的正确程度时,即使图像中的任何特征点消失,光流也有可能找到下一个看起来可能靠近它的点。实际上对于稳健的跟踪,角点应该在特定的时间间隔内检测点。
# 找到特征点后,每 30 帧对光流点的向后检查,只选择好的。)
# Lucas Kanade稀疏光流演示。使用GoodFeatures跟踪用于跟踪初始化和匹配验证的回溯帧之间。
# Lucas-Kanade sparse optical flow demo. Uses goodFeaturesToTrack for track initialization and back-tracking for match verification between frames.
# Usage
# pyhton lk_track.py images/slow_traffic_small.mp4
# 按 ESC键退出
from __future__ import print_function
import imutils
import numpy as np
import cv2
def draw_str(dst, target, s):
x, y = target
cv2.putText(dst, s, (x + 1, y + 1), cv2.FONT_HERSHEY_PLAIN, 1.0, (0, 0, 0), thickness=2, lineType=cv2.LINE_AA)
cv2.putText(dst, s, (x, y), cv2.FONT_HERSHEY_PLAIN, 1.0, (255, 255, 255), lineType=cv2.LINE_AA)
lk_params = dict(winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
feature_params = dict(maxCorners=500,
qualityLevel=0.3,
minDistance=7,
blockSize=7)
class App:
def __init__(self, video_src):
self.track_len = 10
self.detect_interval = 30
self.tracks = []
self.cam = cv2.VideoCapture(video_src)
self.frame_idx = 0
def run(self):
while True:
_ret, frame = self.cam.read()
if not _ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
vis = frame.copy()
if len(self.tracks) > 0:
img0, img1 = self.prev_gray, frame_gray
p0 = np.float32([tr[-1] for tr in self.tracks]).reshape(-1, 1, 2)
p1, _st, _err = cv2.calcOpticalFlowPyrLK(img0, img1, p0, None, **lk_params)
p0r, _st, _err = cv2.calcOpticalFlowPyrLK(img1, img0, p1, None, **lk_params)
d = abs(p0 - p0r).reshape(-1, 2).max(-1)
good = d < 1
new_tracks = []
for tr, (x, y), good_flag in zip(self.tracks, p1.reshape(-1, 2), good):
if not good_flag:
continue
tr.append((x, y))
if len(tr) > self.track_len:
del tr[0]
new_tracks.append(tr)
cv2.circle(vis, (x, y), 2, (0, 255, 0), -1)
self.tracks = new_tracks
cv2.polylines(vis, [np.int32(tr) for tr in self.tracks], False, (0, 255, 0))
draw_str(vis, (20, 20), 'track count: %d' % len(self.tracks))
if self.frame_idx % self.detect_interval == 0:
mask = np.zeros_like(frame_gray)
mask[:] = 255
for x, y in [np.int32(tr[-1]) for tr in self.tracks]:
cv2.circle(mask, (x, y), 5, 0, -1)
p = cv2.goodFeaturesToTrack(frame_gray, mask=mask, **feature_params)
if p is not None:
for x, y in np.float32(p).reshape(-1, 2):
self.tracks.append([(x, y)])
self.prev_gray = frame_gray
cv2.imshow('lk_track', vis)
print(self.frame_idx)
cv2.imwrite('videoOof-imgs/' + str(self.frame_idx) + '.jpg', imutils.resize(vis, 500))
self.frame_idx += 1
ch = cv2.waitKey(1)
if ch == 27:
break
def main():
import sys
try:
video_src = sys.argv[1]
except:
video_src = 0
App(video_src).run()
print('Done')
if __name__ == '__main__':
print(__doc__)
main()
cv2.destroyAllWindows()
3.3 密集光流追踪
# OpenCV中的密集光流
# Lucas-Kanade 方法计算稀疏特征集的光流(使用 Shi-Tomasi 算法检测到的角点)。
# OpenCV 提供了另一种算法: Gunner Farneback 来寻找密集光流。它计算帧中所有点的光流。
# 通过cv2.calcOpticalFlowFarneback() 将得到一个带有光流向量 (u,v) 的 2 通道阵列。可以找到它们的大小和方向,然后对结果进行颜色编码以实现更好的可视化。
# 在HSV图像中,方向对应于图像的色调,幅度对应于价值平面。
import cv2
import imutils
import numpy as np
cap = cv2.VideoCapture('images/slow_traffic_small.mp4')
ret, frame1 = cap.read()
prvs = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(frame1)
hsv[..., 1] = 255
num = 0
while (1):
ret, frame2 = cap.read()
if not ret:
break
next = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 使用迭代Gunner Farneback 方法计算密集特征的光流
# - prvs: 上一帧单通道灰度图
# - next: 下一帧单通道灰度图
# - flow: 流 None
# - pyr_scale: 0.5经典金字塔,构建金字塔缩放scale
# - level:3 初始图像的金字塔层数
# - winsize:3 平均窗口大小,数值越大,算法对图像的鲁棒性越强
# - iterations:15 迭代次数
# - poly_n:5 像素邻域的参数多边形大小,用于在每个像素中找到多项式展开式;较大的值意味着图像将使用更平滑的曲面进行近似,从而产生更高的分辨率、鲁棒算法和更模糊的运动场;通常多边形n=5或7。
# - poly_sigma:1.2 高斯标准差,用于平滑导数
# - flags: 可以是以下操作标志的组合:OPTFLOW_USE_INITIAL_FLOW:使用输入流作为初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN过滤器而不是相同尺寸的盒过滤器;
flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('Origin VS frame2', np.hstack([frame2, rgb]))
cv2.imwrite('dof-imgs/' + str(num) + '.jpg', imutils.resize(np.hstack([frame2, rgb]), 600))
k = cv2.waitKey(30) & 0xff
num = num + 1
if k == 27:
break
elif k == ord('s'):
cv2.imwrite('dof-imgs/origin VS dense optical flow HSVres' + str(num) + ".jpg",
imutils.resize(np.hstack([frame2, rgb]), width=800))
prvs = next
cap.release()
cv2.destroyAllWindows()
参考 https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_video/py_lucas_kanade/py_lucas_kanade.html#lucas-kanade
总结
jsjbwy