前言
这篇博客将了解什么是特征,角点,哈里斯角点检测(Harris Corner Detection)的概念。并使用cv2.cornerHarris(),cv2.cornerSubPix()实现哈里斯角点检测;
1. 效果图
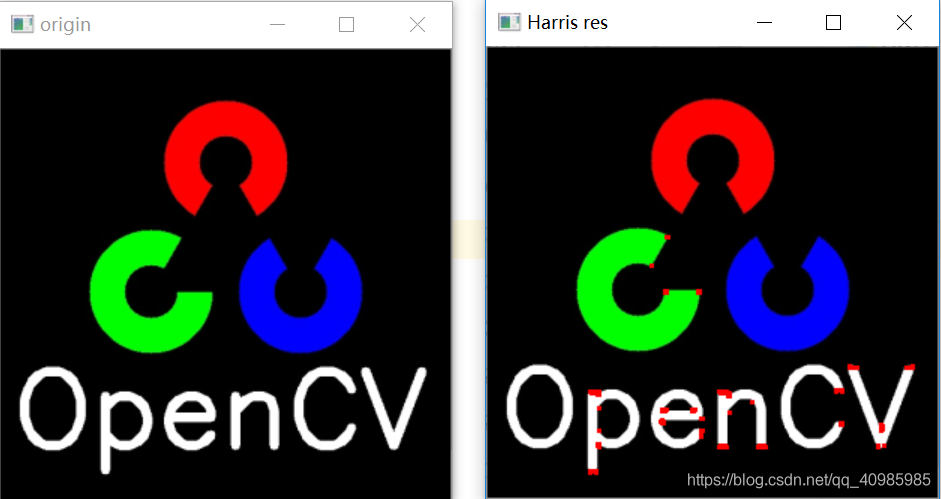
原图 VS Harris角点检测效果图如下:
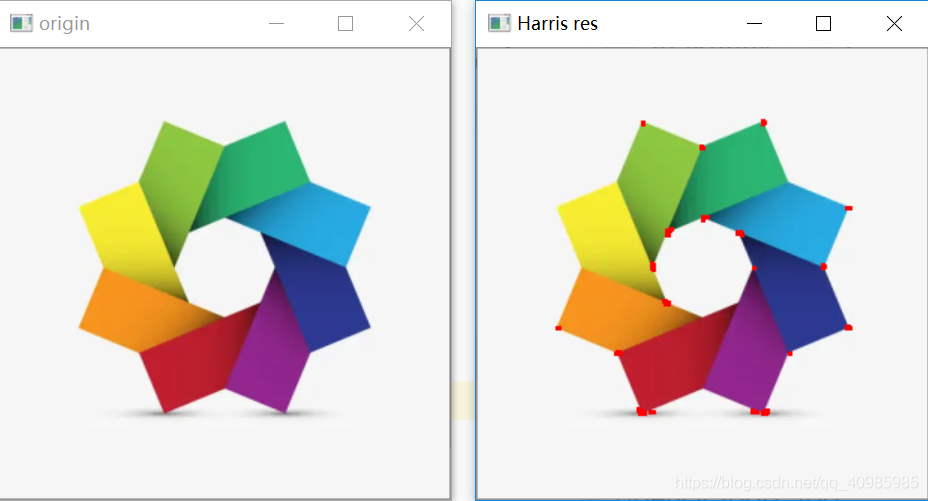
原图 VS Harris角点检测效果图如下:
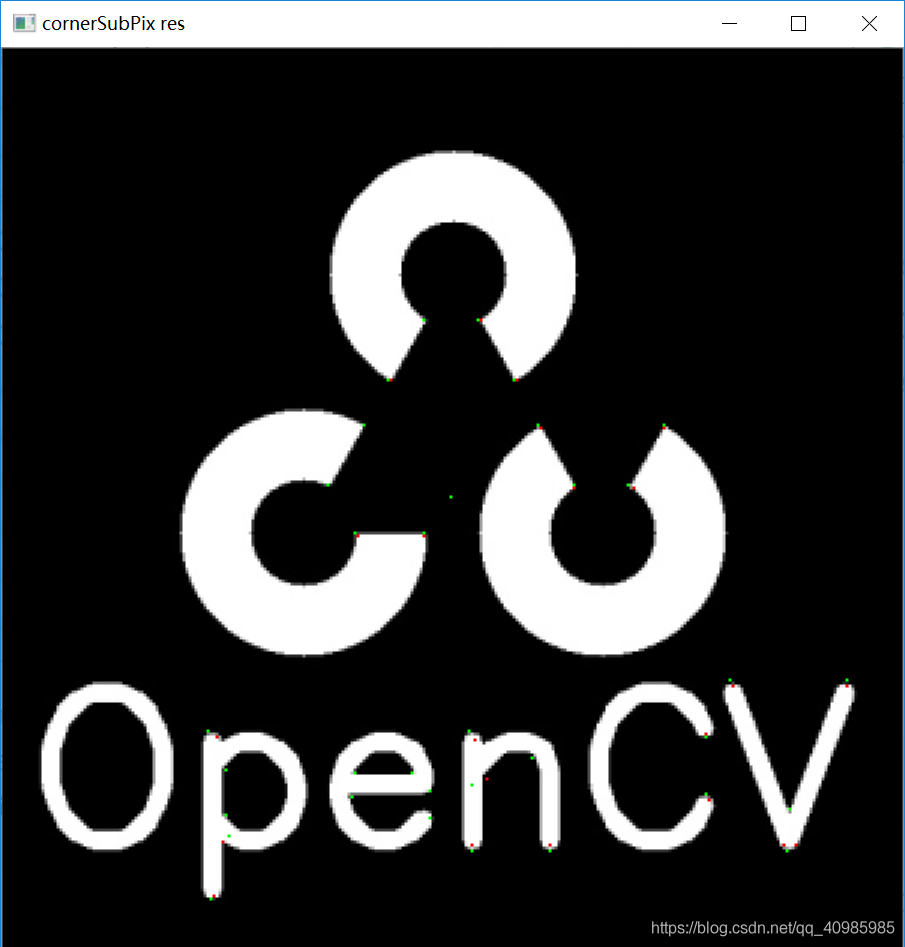
惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
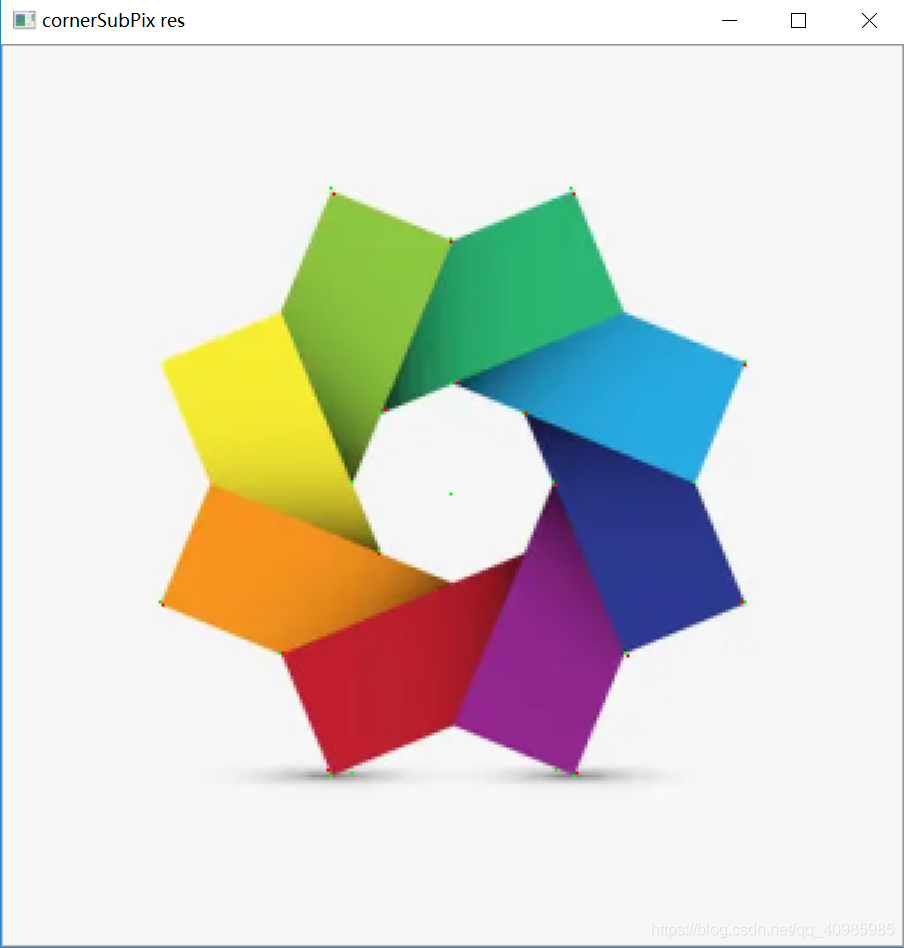
惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
2. 原理
图像最重要的一个要素是特征,一旦有了特征及其描述,就可以在所有图像中找到相同的特征,并将它们对齐、缝合或执行任何您想要的操作。
特征可分为角、边、平面,OpenCV提供了许多不同的算法来查找特征、描述特征、匹配特征等。
角点是图像中各个方向上强度变化较大的区域。
Harris角点检测的结果是一个灰度图像与这些分数。对一个合适的图像进行阈值化可以得到图像中的角点。
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
img: 输入图像,灰度图像,float32
blockSize: 用于角点检测的邻域的大小
ksize: Sobel导数的孔径参数
k: 方程中的k-Harris检测器自由参数
dst:返回值,灰度图像
corners = cv2.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
具有亚像素精度的角点:有时可能需要以最大的精度找到角点。OpenCV附带了一个函数cv2.cornerSubPix(),它可以进一步细化以亚像素精度检测到的角点。
使用 Harris 角点检测器检查逆矩阵的相似性。它表示角点是更好的跟踪点。
3. 源码
3.1 Harris角点检测
# Harris角点检测
import cv2
import numpy as np
img = cv2.imread('images/polygon.jpg')
img = cv2.imread('images/opencv_logo.jpg')
print(img.shape)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("origin", img)
cv2.waitKey(0)
gray = np.float32(gray)
# res = cv2.cornerHarris(gray, 2, 3, 0.04)
# - img: 输入图像,灰度图像,float32
# - blockSize: 用于角点检测的邻域的大小
# - ksize: Sobel导数的孔径参数
# - k: 方程中的k-Harris检测器自由参数
# - res:返回值,灰度图像
res = cv2.cornerHarris(gray, 2, 3, 0.04)
# 扩大标记的内容
res = cv2.dilate(res, None)
# 最佳阈值因图而异
img[res > 0.01 * res.max()] = [0, 0, 255]
cv2.imshow('Harris res', img)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()
3.2 精细角点检测
# 具有亚像素精度的角点
# 有时可能需要以最大的精度找到角点。OpenCV附带了一个函数cv2.cornerSubPix(),它可以进一步细化以亚像素精度检测到的角点。
import cv2
import imutils
import numpy as np
filename = 'images/polygon.jpg'
img = cv2.imread(filename)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 寻找Harris角点
gray = np.float32(gray)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
dst = cv2.dilate(dst, None)
ret, dst = cv2.threshold(dst, 0.01 * dst.max(), 255, 0)
dst = np.uint8(dst)
# 寻找中心点
ret, labels, stats, centroids = cv2.connectedComponentsWithStats(dst)
# 定义停止和细化角点的条件
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv2.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
# 绘制角点和细化的亚像素点
res = np.hstack((centroids, corners))
res = np.int0(res)
# Harris角点用红色像素标记,精细角点用绿色像素标记
img[res[:, 1], res[:, 0]] = [0, 0, 255]
img[res[:, 3], res[:, 2]] = [0, 255, 0]
gray = cv2.cvtColor(gray, cv2.COLOR_GRAY2BGR)
cv2.imshow("gray", img)
gray[res[:, 1], res[:, 0]] = [0, 0, 255]
gray[res[:, 3], res[:, 2]] = [0, 255, 0]
cv2.imshow('cornerSubPix res', imutils.resize(img, width=600))
cv2.waitKey(0)
参考 https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_features_harris/py_features_harris.html#harris-corners
总结
jsjbwy