安装与配置过程
- git clone 项目到本地:
cd ~/Downloads
git clone https://github.com/osrf/car_demo.git
- 建立并定位到新工作空间,或已有工作空间
~/cardemo_ws,这个位置与名字无所谓:
mkdir -p ~/cardemo_ws/src
- 将对应包复制到新建的工作空间的src目录下:
cd ~/Downloads/car_demo_master
cp -r prius_description ~/cardemo_ws/src/prius_description
cp -r prius_msgs ~/cardemo_ws/src/prius_msgs
cp -r car_demo ~/cardemo_ws/src/car_demo
- 编译:
cd ~/cardemo_ws
catkin_make
- 添加环境
echo "source ~/cardemo_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
简单测试
roslaunch car_demo demo.launch
我们会看到RVIZ与Gazebo两个界面
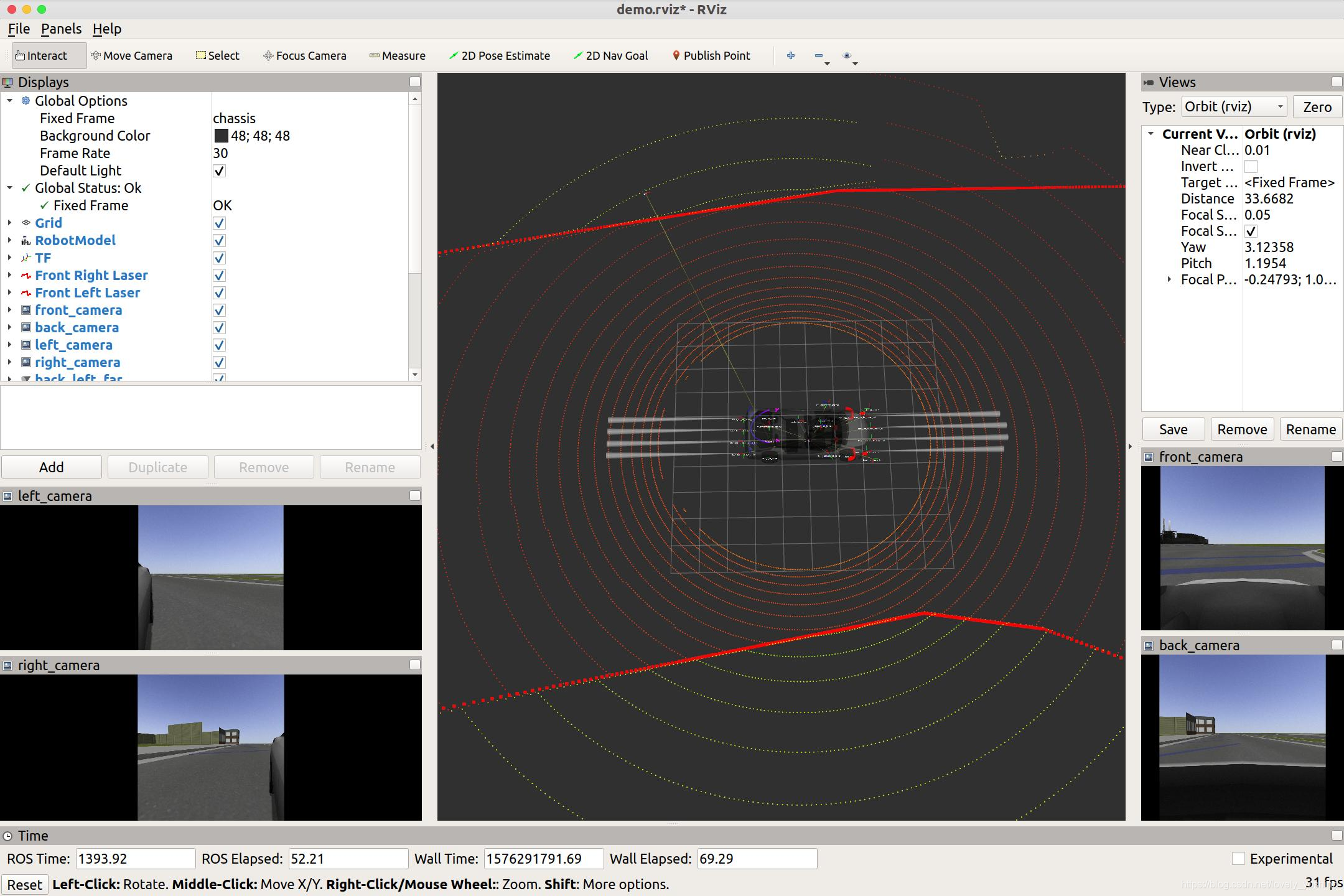

查看topic数据(有激光、声呐、相机、车自身状态等数据):
rostopic list
/amcl_pose
/base_pose_ground_truth
/clicked_point
/clock
/diagnostics
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/joint_states
/joy
/joy/set_feedback
/move_base_simple/goal
/particlecloud
/prius
/prius/back_camera/camera_info
/prius/back_camera/image_raw
/prius/back_camera/image_raw/compressed
/prius/back_camera/image_raw/compressed/parameter_descriptions
/prius/back_camera/image_raw/compressed/parameter_updates
/prius/back_camera/image_raw/compressedDepth
/prius/back_camera/image_raw/compressedDepth/parameter_descriptions
/prius/back_camera/image_raw/compressedDepth/parameter_updates
/prius/back_camera/image_raw/theora
/prius/back_camera/image_raw/theora/parameter_descriptions
/prius/back_camera/image_raw/theora/parameter_updates
/prius/back_camera/parameter_descriptions
/prius/back_camera/parameter_updates
/prius/back_sonar/left_far_range
/prius/back_sonar/left_middle_range
/prius/back_sonar/right_far_range
/prius/back_sonar/right_middle_range
/prius/center_laser/scan
/prius/front_camera/camera_info
/prius/front_camera/image_raw
/prius/front_camera/image_raw/compressed
/prius/front_camera/image_raw/compressed/parameter_descriptions
/prius/front_camera/image_raw/compressed/parameter_updates
/prius/front_camera/image_raw/compressedDepth
/prius/front_camera/image_raw/compressedDepth/parameter_descriptions
/prius/front_camera/image_raw/compressedDepth/parameter_updates
/prius/front_camera/image_raw/theora
/prius/front_camera/image_raw/theora/parameter_descriptions
/prius/front_camera/image_raw/theora/parameter_updates
/prius/front_camera/parameter_descriptions
/prius/front_camera/parameter_updates
/prius/front_left_laser/scan
/prius/front_right_laser/scan
/prius/front_sonar/left_far_range
/prius/front_sonar/left_middle_range
/prius/front_sonar/right_far_range
/prius/front_sonar/right_middle_range
/prius/left_camera/camera_info
/prius/left_camera/image_raw
/prius/left_camera/image_raw/compressed
/prius/left_camera/image_raw/compressed/parameter_descriptions
/prius/left_camera/image_raw/compressed/parameter_updates
/prius/left_camera/image_raw/compressedDepth
/prius/left_camera/image_raw/compressedDepth/parameter_descriptions
/prius/left_camera/image_raw/compressedDepth/parameter_updates
/prius/left_camera/image_raw/theora
/prius/left_camera/image_raw/theora/parameter_descriptions
/prius/left_camera/image_raw/theora/parameter_updates
/prius/left_camera/parameter_descriptions
/prius/left_camera/parameter_updates
/prius/right_camera/camera_info
/prius/right_camera/image_raw
/prius/right_camera/image_raw/compressed
/prius/right_camera/image_raw/compressed/parameter_descriptions
/prius/right_camera/image_raw/compressed/parameter_updates
/prius/right_camera/image_raw/compressedDepth
/prius/right_camera/image_raw/compressedDepth/parameter_descriptions
/prius/right_camera/image_raw/compressedDepth/parameter_updates
/prius/right_camera/image_raw/theora
/prius/right_camera/image_raw/theora/parameter_descriptions
/prius/right_camera/image_raw/theora/parameter_updates
/prius/right_camera/parameter_descriptions
/prius/right_camera/parameter_updates
其中,/prius # 控制车的topic,包括刹车、油门、档位、方向盘转向等命令
简单的控制(随便给的控制命令)
import rospy
from prius_msgs.msg import Control
def control_test():
pub = rospy.Publisher("/prius", Control, queue_size=1)
rospy.init_node('sim_control', anonymous=True)
rate = rospy.Rate(10)
command = Control()
command.header.stamp = rospy.Time.now()
command.throttle = 1.0
command.brake = 0.0
command.shift_gears = Control.FORWARD
while not rospy.is_shutdown():
pub.publish(command)
rate.sleep()
if __name__ == '__main__':
try:
control_test()
except rospy.ROSInterruptException:
pass
我们看到车动机了。
总结
这个无人车仿真环境非常适合,有ROS基础的,并且想基于ROS进行一些研究的童鞋。其它的仿真环境真的很大,非常考验电脑的性能。
cs