0.前言
多传感器融合(Multi-sensor Fusion, MSF)是利用计算机技术,将来自多传感器或多源的信息和数据以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行的信息处理过程。和人的感知相似,不同的传感器拥有其他传感器不可替代的作用,当各种传感器进行多层次,多空间的信息互补和优化组合处理,最终产生对观测环境的一致性解释。
具体来讲,多传感器数据融合处理:
(1)多个不同类型传感器(有源或无源)收集观测目标的数据;
(2)对传感器的输出数据(离散或连续的时间函数数据、输出矢量、成像数据或一个直接的属性说明)进行特征提取的变换,提取代表观测数据的特征矢量Yi;
(3)对特征矢量Yi进行模式识别处理(如聚类算法、自适应神经网络或其他能将特征矢量Yi变换成目标属性判决的统计模式识别法等),完成各传感器关于目标的说明;
(4)将各传感器关于目标的说明数据按同一目标进行分组,即关联;
(5)利用融合算法将目标的各传感器数据进行合成,得到该目标的一致性解释与描述。
1.多传感器融合分类
后端融合算法
后端融合算法又被称为松耦合算法,本质上是对融合后的多维综合数据进行感知,如下图所示,后端融合算法是松散的,在出结果之前,所有的传感器都是独立的,不存在传感器与传感器的约束。
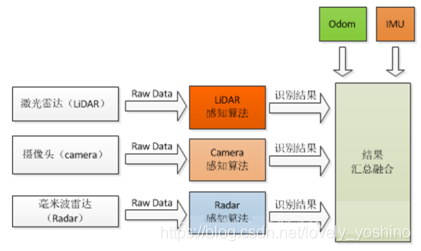
这种后端融合方法常见的融合策略是使用EKF或ESKF来实现(一般常见于LIO当中)。这样会导致
…详情请参照古月居
cs