0. 前言
在了解SLAM的原理、流程后,个人经常实时困惑该如何去从零开始去设计编写一套能够符合我们需求的SLAM框架。作者认为Ceres、Eigen、Sophus、G2O这几个函数库无法避免,尤其是Ceres函数库在激光SLAM和V-SLAM的优化中均有着大量的应用。作者分别从Ceres和Eigen两个函数进行了深入的解析,这一篇文章主要对G2O函数库进行详细的阐述,来方便各位后续的开发。
1.G2O示例
相较于Ceres而言,G2O函数库相对较为复杂,但是适用面更加广,可以解决较为复杂的重定位问题。Ceres库向通用的最小二乘问题的求解,定义优化问题,设置一些选项,可通过Ceres求解。而图优化,是把优化问题表现成图的一种方式,这里的图是图论意义上的图。一个图由若干个顶点,以及连着这些顶点的边组成。在这里,我们用顶点表示优化变量,而用边表示误差项。
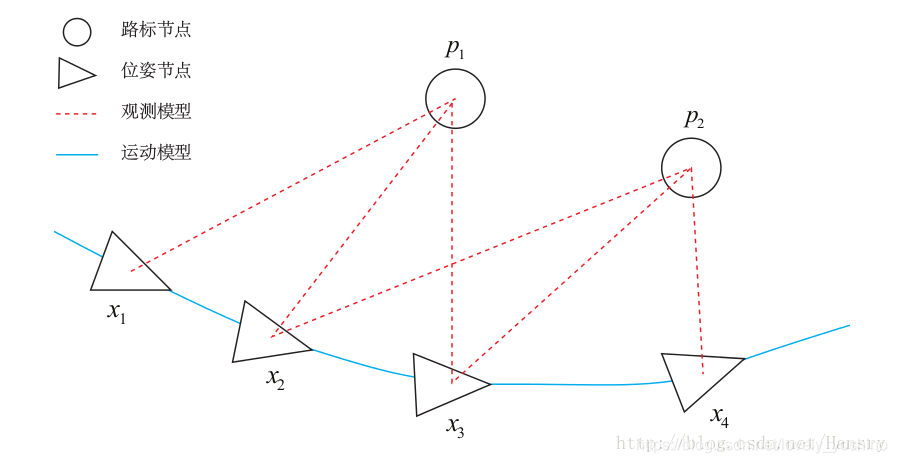
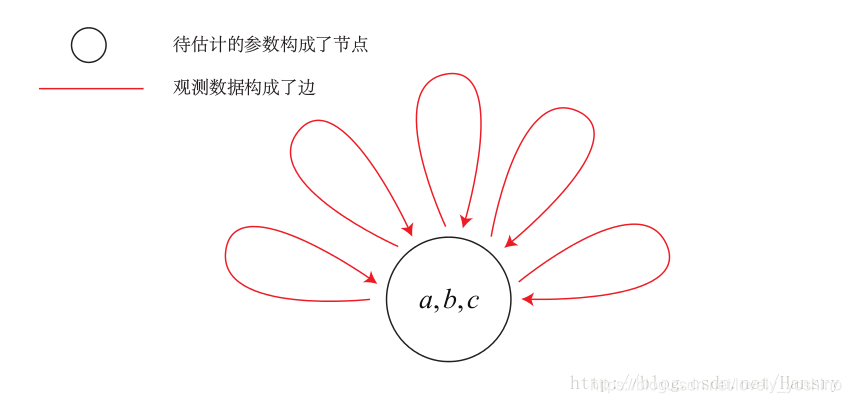
为了使用g2o,首先要将曲线拟合问题抽象成图优化。这个过程中,只要记住节点为优化变量,边为误差项即可。曲线拟合的图优化问题可以画成以下形式:
G2O在数学上主要分为四个求解步骤:
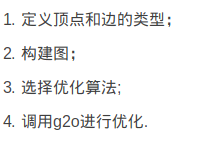
在程序中的反应为:
- 创建一个线性求解器LinearSolver。
- 创建BlockSolver,并用上面定义的线性求解器初始化。
- 创建总求解器solver,并从GN/LM/DogLeg 中选一个作为迭代策略,再用上述块求解器BlockSolver初始化。
- 创建图优化的核心:稀疏优化器(SparseOptimizer)。
- 定义图的顶点和边,并添加到SparseOptimizer中。
- 设置优化参数,开始执行优化。
#include <iostream>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/core/optimization_algorithm_dogleg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <Eigen/Core>
#include <opencv2/core/core.hpp>
#include <cmath>
#include <chrono>
using namespace std;
class CurveFittingVertex: public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl()
{
_estimate << 0,0,0;
}
virtual void oplusImpl( const double* update )
{
_estimate += Eigen::Vector3d(update);
}
virtual bool read( istream& in ) {}
virtual bool write( ostream& out ) const {}
};
class CurveFittingEdge: public g2o::BaseUnaryEdge<1,double,CurveFittingVertex>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
CurveFittingEdge( double x ): BaseUnaryEdge(), _x(x) {}
void computeError()
{
const CurveFittingVertex* v = static_cast<const CurveFittingVertex*> (_vertices[0]);
const Eigen::Vector3d abc = v->estimate();
_error(0,0) = _measurement - std::exp( abc(0,0)*_x*_x + abc(1,0)*_x + abc(2,0) ) ;
}
virtual bool read( istream& in ) {}
virtual bool write( ostream& out ) const {}
public:
double _x;
};
int main( int argc, char** argv )
{
double a=1.0, b=2.0, c=1.0;
int N=100;
double w_sigma=1.0;
cv::RNG rng;
double abc[3] = {0,0,0};
vector<double> x_data, y_data;
cout<<"generating data: "<<endl;
for ( int i=0; i<N; i++ )
{
double x = i/100.0;
x_data.push_back ( x );
y_data.push_back (
exp ( a*x*x + b*x + c ) + rng.gaussian ( w_sigma )
);
cout<<x_data[i]<<" "<<y_data[i]<<endl;
}
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block;
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
Block* solver_ptr = new Block( linearSolver );
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm( solver );
optimizer.setVerbose( true );
CurveFittingVertex* v = new CurveFittingVertex();
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
for ( int i=0; i<N; i++ )
{
CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );
edge->setId(i);
edge->setVertex( 0, v );
edge->setMeasurement( y_data[i] );
edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) );
optimizer.addEdge( edge );
}
cout<<"start optimization"<<endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(100);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 );
cout<<"solve time cost = "<<time_used.count()<<" seconds. "<<endl;
Eigen::Vector3d abc_estimate = v->estimate();
cout<<"estimated model: "<<abc_estimate.transpose()<<endl;
return 0;
}
2. G2O常见函数总结
如下图所示,这个图反应了上述的前五个步骤
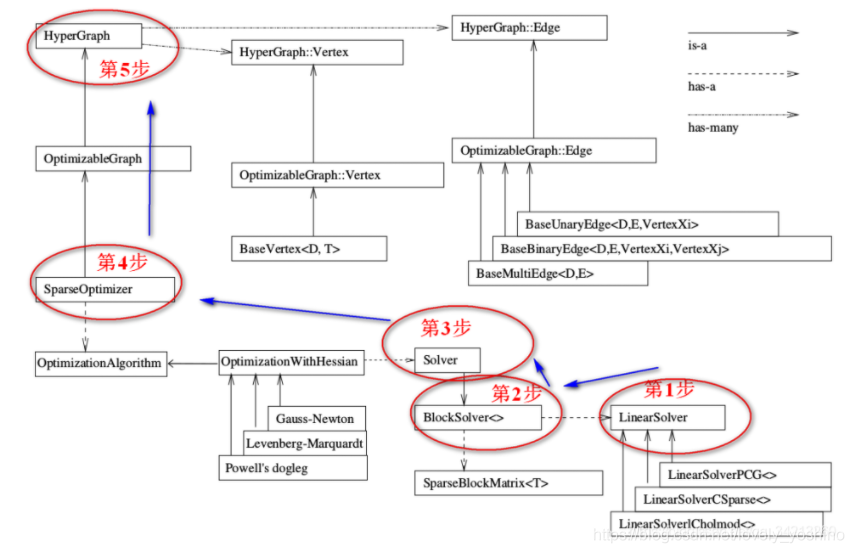
对这个结构框图做一个简单介绍(注意图中三种箭头的含义(右上角注解)):
(1)$\color{#4285f4}{图的核心:整个g2o框架可以分为上下两部分,两部分中间的连接点:SparseOpyimizer 就是整个g2o的核心部分。
(2)往上看,SparseOpyimizer其实是一个Optimizable Graph,从而也是一个超图(HyperGraph)。
(3)
顶
点
和
边
:
\color{#4285f4}{顶点和边:}