15th ЗўЮёЭЈаХздЖЈвхsrv | ЩњГЩЭЗЮФМў
вЛЁЂФПБъМАЗжЮі
ФПБъ:
БраДЗўЮёЭЈаХ,ПЭЛЇЖЫЬсНЛСНИіећЪ§жСЗўЮёЖЫ,ЗўЮёЖЫЧѓКЭВЂЯьгІНсЙћЕНПЭЛЇЖЫЁЃ
ЗжЮі:
дкФЃаЭЪЕЯжжа,ROS master ВЛашвЊЪЕЯж,ЖјСЌНгЕФНЈСЂвВвбОБЛЗтзАСЫ,ашвЊЙизЂЕФЙиМќЕугаШ§Иі:
- ЗўЮёЖЫ
- ПЭЛЇЖЫ
- Ъ§Он
ЖўЁЂЪЕЯжЗНЗЈ(C++)
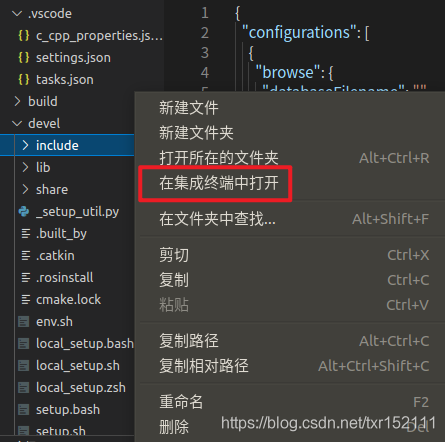
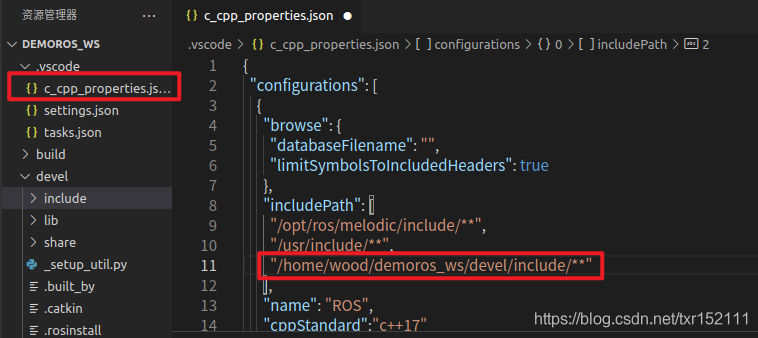
2.0 ХфжУVSCode
ВЛХфжУвВЪЧПЩвдЕФ,ЕЋЪЧВЛФмдйvscodeжаДњТыздЖЏВЙЦы,ЧвЕМБЈЪБVSCodeЛсБЈДэ,ЕЋЪЧВЛгАЯьзюжеГЬађЕФдЫаа,НЈвщХфжУЁЃ
?
?ЪЙгУpwdЛёЕУЕНТЗОЖЁЃ
ЬэМгТЗОЖ:
2.1? ЗўЮёЦїЖЫ
2.1.1аТНЈЮФМў

#include<ros/ros.h>
#include<plumbing_server_client/Addints.h>
/*
ЗўЮёЖЫЪЕЯж:НтЮіПЭЛЇЖЫЬсНЛЕФЪ§Он,ВЂдЫЫудйЗЕЛиЯргІ
1.АќКЌЭЗЮФМў
2.ГѕЪМЛЏrosНкЕу
3.ДДНЈНкЕуОфБњ
4.ДДНЈвЛИіЗўЮёЖдЯѓ
5.ДІРэВЂВњЩњЯргІ
6.spin()
*/
bool doNum(plumbing_server_client::Addints::Request &request,
plumbing_server_client::Addints::Response &response)
{
//1.ДІРэЧыЧѓ
int num1 = request.num1;
int num2 = request.num2;
ROS_INFO("ЪеЕНЕФЧыЧѓЪ§Он:num1 = %d,num2 = %d",num1,num2);
//2.зщжЏЯьгІ
int sum = num2+num1;
response.sum = sum;
ROS_INFO("ЧѓЕУЕФНсЙћЮЊ:sum = %d",sum);
return true;
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.ГѕЪМЛЏrosНкЕу
ros::init(argc,argv,"gongsi"); //ЩшжУНкЕуУћ,ЮЊgongsi
// 3.ДДНЈНкЕуОфБњ
ros::NodeHandle nh;
// 4.ДДНЈвЛИіЗўЮёЖдЯѓ
ros::ServiceServer server = nh.advertiseService("AddInts",doNum);
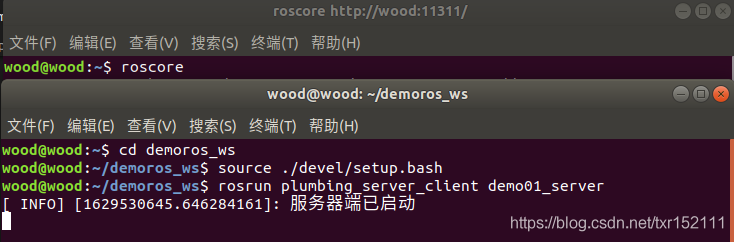
ROS_INFO("ЗўЮёЦїЖЫвбЦєЖЏ");
// 5.ДІРэВЂВњЩњЯргІ
// 6.spin()
ros::spin();
return 0;
}
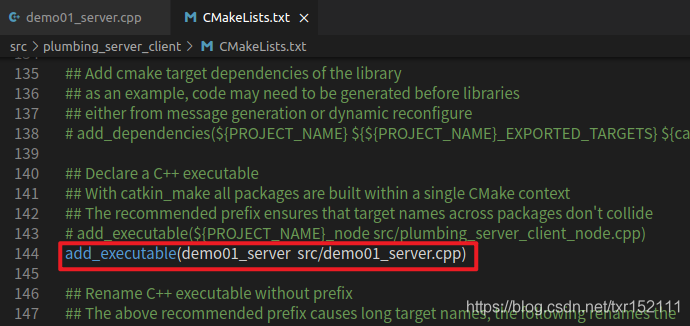
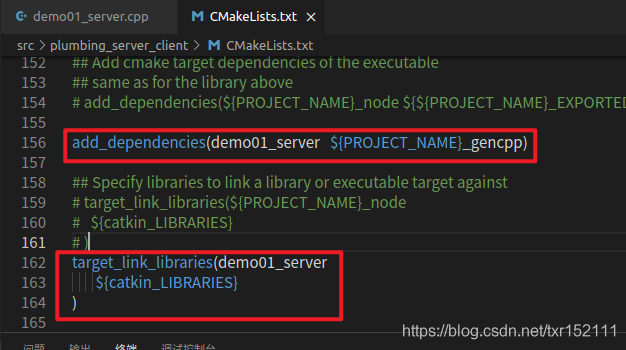
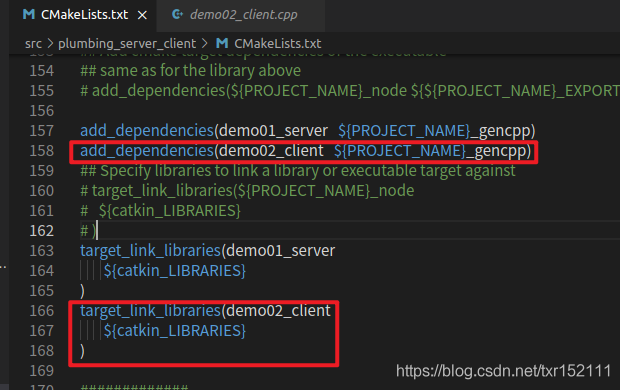
2.1.2ЗўЮёЦїЖЫЕФХфжУ
дкCMakelist.txtЮФМўжа:
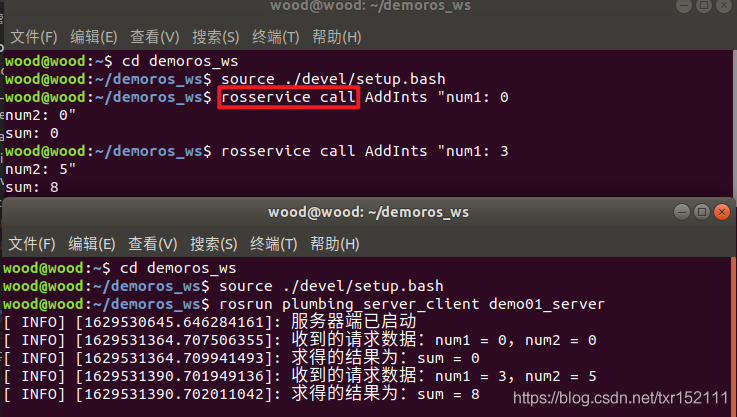
2.1.3БрвыМАВтЪд
Брвы:Ctrl + Shift + B
rosservice? call? AddInts? ?TabМќВЙЦы
?2.2 ПЭЛЇЖЫ
2.2.1 аТНЈЮФМў
#include<ros/ros.h>
#include<plumbing_server_client/Addints.h>
/*
ПЭЛЇЖЫ:ЬсНЛСНИіећЪ§,ВЂДІРэЯьгІЕФНсЙћ(ДђгЁГіРДМДПЩ)
1.АќКЌЭЗЮФМў
2.ГѕЪМЛЏrosНкЕу
3.ДДНЈНкЕуОфБњ
4.ДДНЈвЛИіПЭЛЇЖЫЖдЯѓ
5.ЬсНЛЧыЧѓВЂДІРэЯргІ
УЛгаЛиЕїКЏЪ§,spin()ОЭПЩгаПЩЮоСЫ
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.ГѕЪМЛЏrosНкЕу
ros::init(argc,argv,"DaBao");
// 3.ДДНЈНкЕуОфБњ
ros::NodeHandle nh;
// 4.ДДНЈвЛИіПЭЛЇЖЫЖдЯѓ
ros::ServiceClient client = nh.serviceClient<plumbing_server_client::Addints>("AddInts");
// 5.ЬсНЛЧыЧѓВЂДІРэЯргІ
//5.1зщжЏЧыЧѓ
plumbing_server_client::Addints ai;
ai.request.num1 = 100;
ai.request.num2 = 200;
//5.2ДІРэЯьгІ
client.call(ai);
bool flag = client.call(ai);
if (flag = true)
{
ROS_INFO("ЯьгІГЩЙІ!");
ROS_INFO("ЯьгІНсЙћ=%d",ai.response.sum);
}
else
{
ROS_INFO("ДІРэЪЇАм!");
}
return 0;
}
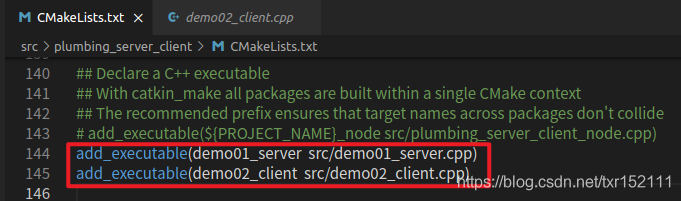
2.2.2 ХфжУ
CMakelists.txtЮФМўжа:
2.2.3 БрвыВЂВтЪд
?Брвы:Ctrl + Shift + B
?ВтЪд:

2.2.4 ПЭЛЇЖЫЕФгХЛЏЁЊЁЊВЮЪ§ЕФЖЏЬЌЬсНЛ
етЩЯУцЕФР§ГЬжа,num1КЭnum2ЖМЪЧЙЬЖЈЫРЕФ,ШчКЮЪЕЯжФЧжжШЮвтЪфШыЕФВЮЪ§Фи,ЪЕЯжВЮЪ§ЕФЖЏЬЌЬсНЛЁЃИёЪН: rosrun ?АќУћ ?НкЕуУћ ?num1 ?num2
#include<ros/ros.h>
#include<plumbing_server_client/Addints.h>
/*
ПЭЛЇЖЫ:ЬсНЛСНИіећЪ§,ВЂДІРэЯьгІЕФНсЙћ(ДђгЁГіРДМДПЩ)
1.АќКЌЭЗЮФМў
2.ГѕЪМЛЏrosНкЕу
3.ДДНЈНкЕуОфБњ
4.ДДНЈвЛИіПЭЛЇЖЫЖдЯѓ
5.ЬсНЛЧыЧѓВЂДІРэЯргІ
УЛгаЛиЕїКЏЪ§,spin()ОЭПЩгаПЩЮоСЫ
ЪЕЯжВЮЪ§ЕФЖЏЬЌЬсНЛ:
1.ИёЪН: rosrun АќУћ НкЕуУћ num1 num2
2.НкЕужДааЪБ,ашвЊЛёШЁУќСюжаЕФВЮЪ§,ВЂИГжЕШыrequest
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//гХЛЏЪЕЯж,ЛёШЁУќСюжаЕФВЮЪ§
if (argc != 3)
{
ROS_INFO("ЬсНЛЕФВЮЪ§ИіЪ§ВЛЖд");
return 1;
}
// 2.ГѕЪМЛЏrosНкЕу
ros::init(argc,argv,"DaBao");
// 3.ДДНЈНкЕуОфБњ
ros::NodeHandle nh;
// 4.ДДНЈвЛИіПЭЛЇЖЫЖдЯѓ
ros::ServiceClient client = nh.serviceClient<plumbing_server_client::Addints>("AddInts");
// 5.ЬсНЛЧыЧѓВЂДІРэЯргІ
//5.1зщжЏЧыЧѓ
plumbing_server_client::Addints ai;
ai.request.num1 = atoi(argv[1]);
ai.request.num2 = atoi(argv[2]); //atoi,НЋзжЗћДЎРраЭзЊЛЛЮЊећЪ§РраЭ
//5.2ДІРэЯьгІ
client.call(ai);
bool flag = client.call(ai);
if (flag = true)
{
ROS_INFO("ЯьгІГЩЙІ!");
ROS_INFO("ЯьгІНсЙћ=%d",ai.response.sum);
}
else
{
ROS_INFO("ДІРэЪЇАм!");
}
return 0;
}
?дЫааВтЪд: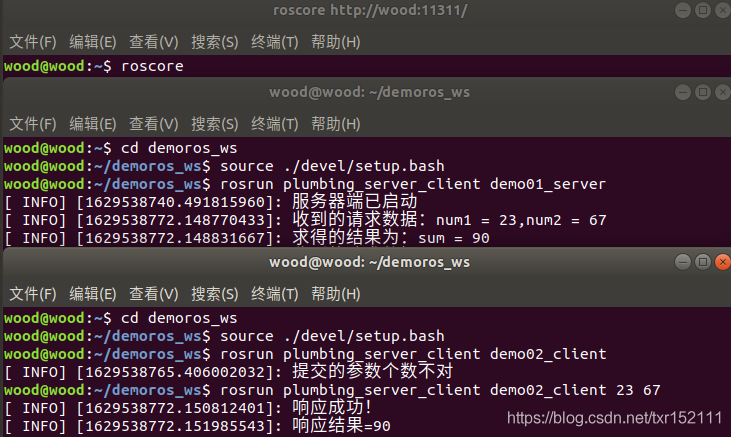
?3.ЫМПМЬт
ШчЙћЯШЦєЖЏПЭЛЇЖЫ,ФЧУДЛсЕМжТдЫааЪЇАм,ЕЋЪЧЯждкОЭашвЊЯШЦєЖЏПЭЛЇЖЫ,ВЂЧввЊЧѓе§ГЃЙвЦ№,ШчКЮЪЕЯж?
гХЛЏ:
дкПЭЛЇЖЫЗЂЫЭЧыЧѓЧАЬэМг:client.waitForExistence();
Лђ:ros::service::waitForService("AddInts");? ?ашвЊДЋвЛИіВЮЪ§,ЮЊЗўЮёЕФЛАЬтУћЁЃ
етЪЧвЛИізшШћЪНКЏЪ§,жЛгаЗўЮёЦєЖЏГЩЙІКѓВХЛсМЬајжДаа
ДЫДІПЩвдЪЙгУ launch ЮФМўгХЛЏ,ЕЋЪЧашвЊзЂвт args ДЋВЮЬиЕу
?
cs