一、引言
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据,关于参数服务器的典型应用场景如下:
- 导航实现时,会进行路径规划,比如: 全局路径规划,设计一个从出发点到目标点的大致路径。本地路径规划,会根据当前路况生成时时的行进路径(全局路径规划指整体的大方案,指导性文件一样,本地路径规划就是根据实际的情况进行调整,属于实际操作上的动作)
简单来说,参数服务器就是一个仓库,不同人既可以向里面存储数据,又可以从里面取数据。
上述场景中,全局路径规划和本地路径规划时,就会使用到参数服务器:
- 路径规划时,需要参考小车的尺寸,我们可以将这些尺寸信息存储到参数服务器,全局路径规划节点与本地路径规划节点都可以从参数服务器中调用这些参数
参数服务器,一般适用于存在数据共享的一些应用场景。
二、操作
增、删、改、查
三、理论模型
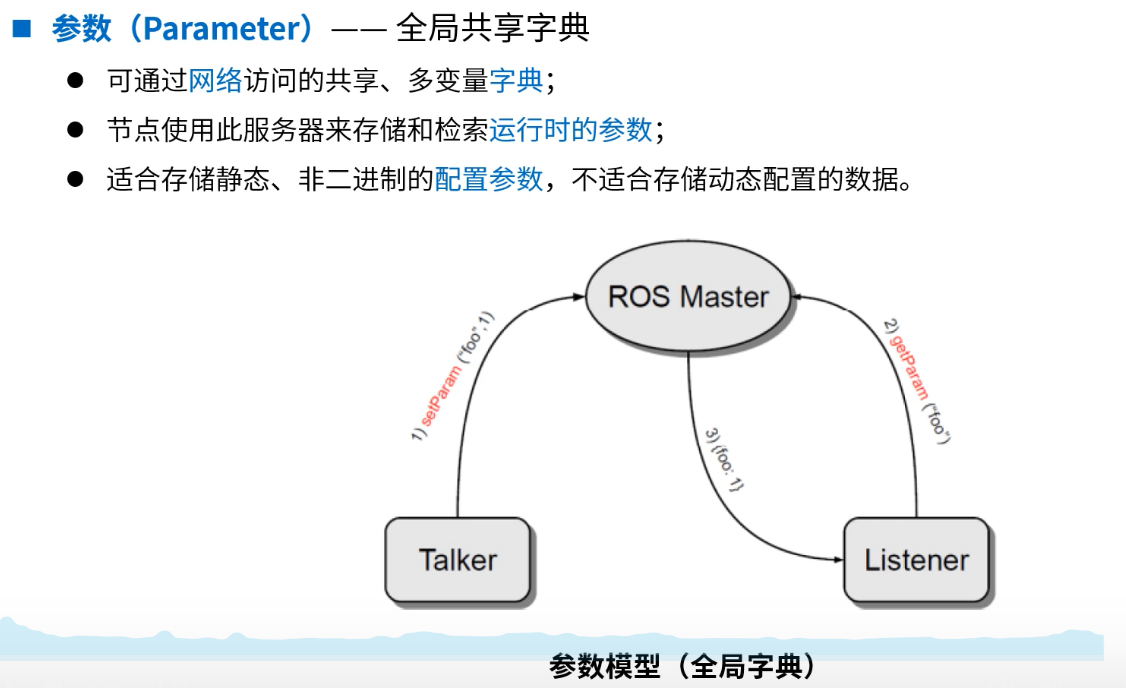
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (参数设置者)
- Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
实现流程:
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
- ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
参数可使用数据类型:
cs