from math import exp
import numpy as np
import cv2
import os
class GaussianTransformer(object):
def __init__(self, imgSize=512, region_threshold=0.4,
affinity_threshold=0.2):
distanceRatio = 3.34
scaledGaussian = lambda x: exp(-(1 / 2) * (x ** 2))
self.region_threshold = region_threshold
self.imgSize = imgSize
self.standardGaussianHeat = self._gen_gaussian_heatmap(imgSize, distanceRatio)
_, binary = cv2.threshold(self.standardGaussianHeat, region_threshold * 255, 255, 0)
np_contours = np.roll(np.array(np.where(binary != 0)), 1, axis=0).transpose().reshape(-1, 2)
x, y, w, h = cv2.boundingRect(np_contours)
self.regionbox = np.array([[x, y], [x + w, y], [x + w, y + h], [x, y + h]], dtype=np.int32)
# print("regionbox", self.regionbox)
_, binary = cv2.threshold(self.standardGaussianHeat, affinity_threshold * 255, 255, 0)
np_contours = np.roll(np.array(np.where(binary != 0)), 1, axis=0).transpose().reshape(-1, 2)
x, y, w, h = cv2.boundingRect(np_contours)
self.affinitybox = np.array([[x, y], [x + w, y], [x + w, y + h], [x, y + h]], dtype=np.int32)
# print("affinitybox", self.affinitybox)
self.oribox = np.array([[0, 0, 1], [imgSize - 1, 0, 1], [imgSize - 1, imgSize - 1, 1], [0, imgSize - 1, 1]],
dtype=np.int32)
def _gen_gaussian_heatmap(self, imgSize, distanceRatio):
scaledGaussian = lambda x: exp(-(1 / 2) * (x ** 2))
heat = np.zeros((imgSize, imgSize), np.uint8)
for i in range(imgSize):
for j in range(imgSize):
distanceFromCenter = np.linalg.norm(np.array([i - imgSize / 2, j - imgSize / 2]))
distanceFromCenter = distanceRatio * distanceFromCenter / (imgSize / 2)
scaledGaussianProb = scaledGaussian(distanceFromCenter)
heat[i, j] = np.clip(scaledGaussianProb * 255, 0, 255)
return heat
def _test(self):
sigma = 10
spread = 3
extent = int(spread * sigma)
center = spread * sigma / 2
gaussian_heatmap = np.zeros([extent, extent], dtype=np.float32)
for i_ in range(extent):
for j_ in range(extent):
gaussian_heatmap[i_, j_] = 1 / 2 / np.pi / (sigma ** 2) * np.exp(
-1 / 2 * ((i_ - center - 0.5) ** 2 + (j_ - center - 0.5) ** 2) / (sigma ** 2))
gaussian_heatmap = (gaussian_heatmap / np.max(gaussian_heatmap) * 255).astype(np.uint8)
images_folder = os.path.abspath(os.path.dirname(__file__)) + '/images'
threshhold_guassian = cv2.applyColorMap(gaussian_heatmap, cv2.COLORMAP_JET)
cv2.imwrite(os.path.join(images_folder, 'test_guassian.jpg'), threshhold_guassian)
def add_region_character(self, image, target_bbox, regionbox=None):
if np.any(target_bbox < 0) or np.any(target_bbox[:, 0] > image.shape[1]) or np.any(
target_bbox[:, 1] > image.shape[0]):
return image
affi = False
if regionbox is None:
regionbox = self.regionbox.copy()
else:
affi = True
M = cv2.getPerspectiveTransform(np.float32(regionbox), np.float32(target_bbox))
oribox = np.array(
[[[0, 0], [self.imgSize - 1, 0], [self.imgSize - 1, self.imgSize - 1], [0, self.imgSize - 1]]],
dtype=np.float32)
test1 = cv2.perspectiveTransform(np.array([regionbox], np.float32), M)[0]
real_target_box = cv2.perspectiveTransform(oribox, M)[0]
# print("test\ntarget_bbox", target_bbox, "\ntest1", test1, "\nreal_target_box", real_target_box)
real_target_box = np.int32(real_target_box)
real_target_box[:, 0] = np.clip(real_target_box[:, 0], 0, image.shape[1])
real_target_box[:, 1] = np.clip(real_target_box[:, 1], 0, image.shape[0])
# warped = cv2.warpPerspective(self.standardGaussianHeat.copy(), M, (image.shape[1], image.shape[0]))
# warped = np.array(warped, np.uint8)
# image = np.where(warped > image, warped, image)
if np.any(target_bbox[0] < real_target_box[0]) or (
target_bbox[3, 0] < real_target_box[3, 0] or target_bbox[3, 1] > real_target_box[3, 1]) or (
target_bbox[1, 0] > real_target_box[1, 0] or target_bbox[1, 1] < real_target_box[1, 1]) or (
target_bbox[2, 0] > real_target_box[2, 0] or target_bbox[2, 1] > real_target_box[2, 1]):
# if False:
warped = cv2.warpPerspective(self.standardGaussianHeat.copy(), M, (image.shape[1], image.shape[0]))
warped = np.array(warped, np.uint8)
image = np.where(warped > image, warped, image)
# _M = cv2.getPerspectiveTransform(np.float32(regionbox), np.float32(_target_box))
# warped = cv2.warpPerspective(self.standardGaussianHeat.copy(), _M, (width, height))
# warped = np.array(warped, np.uint8)
#
# # if affi:
# # print("warped", warped.shape, real_target_box, target_bbox, _target_box)
# # cv2.imshow("1123", warped)
# # cv2.waitKey()
# image[ymin:ymax, xmin:xmax] = np.where(warped > image[ymin:ymax, xmin:xmax], warped,
# image[ymin:ymax, xmin:xmax])
else:
xmin = real_target_box[:, 0].min()
xmax = real_target_box[:, 0].max()
ymin = real_target_box[:, 1].min()
ymax = real_target_box[:, 1].max()
width = xmax - xmin
height = ymax - ymin
_target_box = target_bbox.copy()
_target_box[:, 0] -= xmin
_target_box[:, 1] -= ymin
_M = cv2.getPerspectiveTransform(np.float32(regionbox), np.float32(_target_box))
warped = cv2.warpPerspective(self.standardGaussianHeat.copy(), _M, (width, height))
warped = np.array(warped, np.uint8)
if warped.shape[0] != (ymax - ymin) or warped.shape[1] != (xmax - xmin):
print("region (%d:%d,%d:%d) warped shape (%d,%d)" % (
ymin, ymax, xmin, xmax, warped.shape[1], warped.shape[0]))
return image
# if affi:
# print("warped", warped.shape, real_target_box, target_bbox, _target_box)
# cv2.imshow("1123", warped)
# cv2.waitKey()
image[ymin:ymax, xmin:xmax] = np.where(warped > image[ymin:ymax, xmin:xmax], warped,
image[ymin:ymax, xmin:xmax])
return image
def add_affinity_character(self, image, target_bbox):
return self.add_region_character(image, target_bbox, self.affinitybox)
def add_affinity(self, image, bbox_1, bbox_2):
center_1, center_2 = np.mean(bbox_1, axis=0), np.mean(bbox_2, axis=0)
tl = np.mean([bbox_1[0], bbox_1[1], center_1], axis=0)
bl = np.mean([bbox_1[2], bbox_1[3], center_1], axis=0)
tr = np.mean([bbox_2[0], bbox_2[1], center_2], axis=0)
br = np.mean([bbox_2[2], bbox_2[3], center_2], axis=0)
affinity = np.array([tl, tr, br, bl])
return self.add_affinity_character(image, affinity.copy()), np.expand_dims(affinity, axis=0)
def generate_region(self, image_size, bboxes):
height, width = image_size[0], image_size[1]
target = np.zeros([height, width], dtype=np.uint8)
for i in range(len(bboxes)):
character_bbox = np.array(bboxes[i].copy())
for j in range(bboxes[i].shape[0]):
target = self.add_region_character(target, character_bbox[j])
return target
def generate_affinity(self, image_size, bboxes, words):
height, width = image_size[0], image_size[1]
target = np.zeros([height, width], dtype=np.uint8)
affinities = []
for i in range(len(words)):
character_bbox = np.array(bboxes[i])
total_letters = 0
for char_num in range(character_bbox.shape[0] - 1):
target, affinity = self.add_affinity(target, character_bbox[total_letters],
character_bbox[total_letters + 1])
affinities.append(affinity)
total_letters += 1
if len(affinities) > 0:
affinities = np.concatenate(affinities, axis=0)
return target, affinities
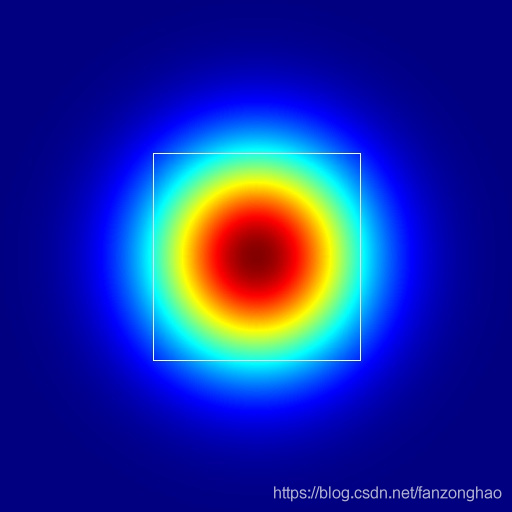
def saveGaussianHeat(self):
images_folder = os.path.abspath(os.path.dirname(__file__)) + '/images'
print('==images_folder:', images_folder)
if not os.path.exists(images_folder):
os.mkdir(images_folder)
cv2.imwrite(os.path.join(images_folder, 'standard.jpg'), self.standardGaussianHeat)
warped_color = cv2.applyColorMap(self.standardGaussianHeat, cv2.COLORMAP_JET)
cv2.polylines(warped_color, [np.reshape(self.regionbox, (-1, 1, 2))], True, (255, 255, 255), thickness=1)
cv2.imwrite(os.path.join(images_folder, 'standard_color.jpg'), warped_color)
standardGaussianHeat1 = self.standardGaussianHeat.copy()
threshhold = self.region_threshold * 255
standardGaussianHeat1[standardGaussianHeat1 > 0] = 255
threshhold_guassian = cv2.applyColorMap(standardGaussianHeat1, cv2.COLORMAP_JET)
cv2.polylines(threshhold_guassian, [np.reshape(self.regionbox, (-1, 1, 2))], True, (255, 255, 255), thickness=1)
cv2.imwrite(os.path.join(images_folder, 'threshhold_guassian.jpg'), threshhold_guassian)
if __name__ == '__main__':
gaussian = GaussianTransformer(512, 0.4, 0.2)
gaussian.saveGaussianHeat()
gaussian._test()
bbox0 = np.array([[[0, 0], [100, 0], [100, 100], [0, 100]]])
image = np.zeros((500, 500), np.uint8)
# image = gaussian.add_region_character(image, bbox)
bbox1 = np.array([[[100, 0], [200, 0], [200, 100], [100, 100]]])
bbox2 = np.array([[[100, 100], [200, 100], [200, 200], [100, 200]]])
bbox3 = np.array([[[0, 100], [100, 100], [100, 200], [0, 200]]])
bbox4 = np.array([[[96, 0], [151, 9], [139, 64], [83, 58]]])
# image = gaussian.add_region_character(image, bbox)
# print(image.max())
image = gaussian.generate_region((500, 500, 1), [bbox3])
# target_gaussian_heatmap_color = imgproc.cvt2HeatmapImg(image.copy() / 255)
# cv2.imshow("test", target_gaussian_heatmap_color)
# cv2.imwrite("test.jpg", target_gaussian_heatmap_color)
# cv2.waitKey()
 ? ? ? ? ??
? ? ? ? ??
? 1.БъзМИпЫЙЗжВМ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?2.ЮБВЪЩЋ
?
cs