?
环境配置:
ubuntu16.04 + kinetic
安装rrt_exploration (参照这里)
1、安装所需的包
$ sudo apt-get install ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-kobuki ros-kinetic-kobuki-core ros-kinetic-kobuki-gazebo
$ sudo apt-get install python-opencv python-numpy python-scikits-learn
2、安装rrt_exploration 、 rrt_exploration_tutorials
$ cd ~/catkin_ws/src/
$ git clone https://github.com/hasauino/rrt_exploration.git
$ git clone https://github.com/hasauino/rrt_exploration_tutorials.git
$ cd ~/catkin_ws
$ catkin_make
测试
1、Gazebo simulation
$ roslaunch rrt_exploration_tutorials single_simulated_house.launch
2、Start Exploration
$ roslaunch rrt_exploration single.launch
3、在rviz里点5个点
?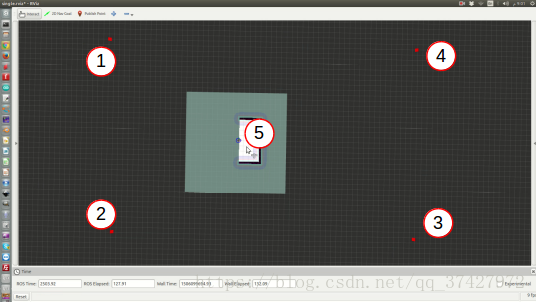
即可开始
如果出现gazebo打不开
?可参考我的另一篇博客https://blog.csdn.net/qq_37427972/article/details/82853655
cs