电路: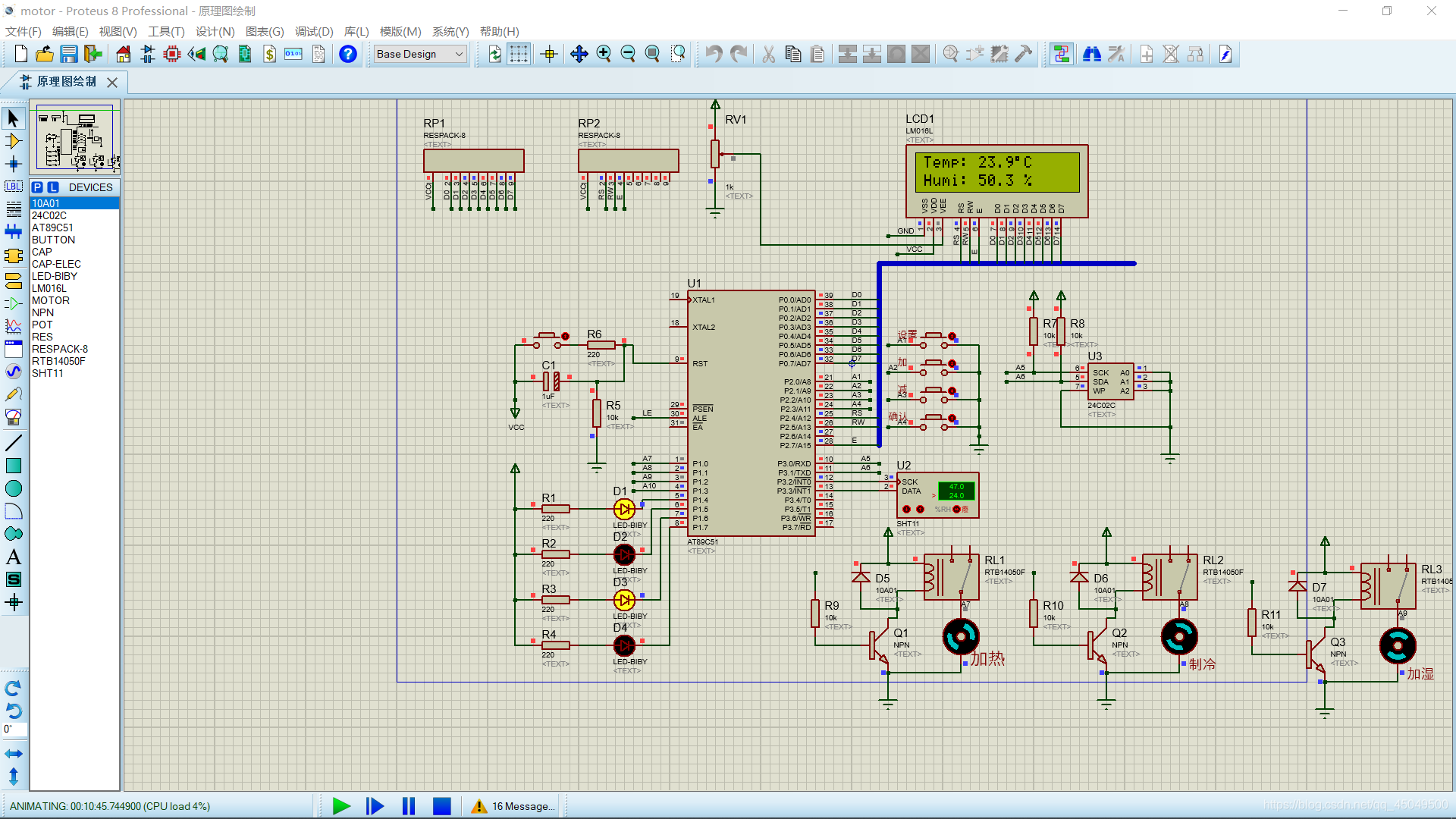
程序:一个主函数,三个头文件分别对应设计中用到的三个主要元件
#include<reg52.h>
#include <intrins.h>
#include <math.h>
#include <stdio.h>
#include <1602.h>
#include <sht11.h>
#include <24c02.h>
#define uchar unsigned char
#define uint unsigned int
#define W_cmd 0xa0
#define R_cmd 0xa1
uint temp,humi;
value humi_val,temp_val;
uchar error;
uchar checksum;
uchar TEMP_data[7];
uchar HUMI_data[6];
uchar show_temp[5];
uchar show_humi[4];
uchar data temp_humi_cache[4];
uchar temp_set;
uchar humi_set;
uchar presskeynum;
uchar nn;
uchar code word1[]={" a product of "};
uchar code word2[]={"UNITED ELECTRONS"};
uchar code word3[]={" Welcome........"};
sbit k1=P2^0;
sbit k2=P2^1;
sbit k3=P2^2;
sbit k4=P2^3;
sbit led1=P1^4;
sbit led2=P1^5;
sbit led3=P1^6;
sbit led4=P1^7;
sbit motor1=P1^0;
sbit motor2=P1^1;
sbit motor3=P1^2;
sbit motor4=P1^3;
sbit P2_6=P2^6;
void delay(uint z)
{
int a,b;
for(a=z;a>0;a--)
for(b=120;b>0;b--);
}
void key()
{
uchar m;
if (k1==0)
{
delay(5);
if (k1==0)
{
presskeynum++;
if(presskeynum==3)
presskeynum=0;
while(k1==0);
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN);
}
}
if(presskeynum==1)
{
if(k2==0)
{
delay(300);
temp_set++;
if (temp_set>30)
temp_set=30;
while(k2==0);
}
if(k3==0)
{
delay(300);
temp_set--;
if (temp_set<18)
temp_set=18;
while(k3==0);
}
}
if(presskeynum==2)
{
if(k2==0)
{
delay(300);
humi_set++;
if (humi_set>99)
humi_set=99;
while(k2==0);
}
if(k3==0)
{
delay(300);
humi_set--;
if (humi_set<1)
humi_set=1;
}
}
if(k4==0)
{
delay(10);
if(k4==0)
{
while(k4==0);
presskeynum=0;
temp_humi_cache[0]=temp_set/10;
temp_humi_cache[1]=temp_set%10;
temp_humi_cache[2]=humi_set/10;
temp_humi_cache[3]=humi_set%10;
for(m=0;m<4;m++)
{
WriteIIC(W_cmd,0x00+m,temp_humi_cache[m]);
}
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN);
}
}
}
void main()
{
uchar t;
k1=k2=k3=k4=1;
motor1=motor2=motor3=motor4=0;
P2_6=0;
for (t=0;t<4;t++)
temp_humi_cache[t]=ReadIIC(W_cmd,0x00+t,R_cmd);
temp_set=temp_humi_cache[0]*10+temp_humi_cache[1];
humi_set=temp_humi_cache[2]*10+temp_humi_cache[3];
LCD_Initial();
GotoXY(0,0);
Print_slow(word1);
GotoXY(0,1);
Print_slow(word2);
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN);
GotoXY(0,0);
Print_slow(word3);
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN);
while(1)
{
key();
if(presskeynum==0)
{
s_connectionreset();
error=0;
error+=s_measure((unsigned char*)&temp_val.i,&checksum,TEMP);
error+=s_measure((unsigned char*)&humi_val.i,&checksum,HUMI);
if(error!=0)
s_connectionreset();
else
{
humi_val.f=(float)humi_val.i;
temp_val.f=(float)temp_val.i;
calc_sth10(&humi_val.f,&temp_val.f);
temp=temp_val.f*10