ЪЙгУздЖЈвхФкКЫЖдЭМЯёНјааОэЛ§ЁЃИУЙІФмНЋШЮвтЯпадТЫВЈЦїгІгУгкЭМЯёЁЃжЇГжОЭЕиВйзїЁЃЕБЙтШІВПЗжЮЛгкЭМЯёЭтВПЪБ,ИУЙІФмЛсИљОнжИЖЈЕФБпПђФЃЪНВхШывьГЃЯёЫижЕЁЃ
dst=cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
ВЮЪ§:
| ВЮЪ§ | УшЪі |
| src | дЭМЯё |
| dst | ФПБъЭМЯё,гыдЭМЯёГпДчКЭЭЈЙ§Ъ§ЯрЭЌ |
| ddepth | ФПБъЭМЯёЕФЫљашЩюЖШ |
| kernel | ОэЛ§КЫ(ЛђЯрЕБгкЯрЙиКЫ),ЕЅЭЈЕРИЁЕуОиеѓ;ШчЙћвЊНЋВЛЭЌЕФФкКЫгІгУгкВЛЭЌЕФЭЈЕР,ЧыЪЙгУВ№ЗжНЋЭМЯёВ№ЗжЮЊЕЅЖРЕФбеЩЋЦНУц,ШЛКѓЕЅЖРДІРэЫќУЧЁЃ |
| anchor | ФкКЫЕФУЊЕу,жИЪОФкКЫжаЙ§ТЫЕуЕФЯрЖдЮЛжУ;УЊгІЮЛгкФкКЫжа;ФЌШЯжЕ(-1,-1)БэЪОУЊЮЛгкФкКЫжааФЁЃ |
| detal | дкНЋЫќУЧДцДЂдкdstжажЎЧА,НЋПЩбЁжЕЬэМгЕНвбЙ§ТЫЕФЯёЫижаЁЃРрЫЦгкЦЋжУЁЃ |
| borderType | ЯёЫиЭтЭЦЗЈ,ВЮМћBorderTypes |
ИУКЏЪ§ЪЕМЪМЦЫуЕФЪЧЯрЙиад,ЖјВЛЪЧОэЛ§

дкФкКЫзуЙЛДѓ(~11x11ЛђепИќДѓ)ЕФЪБКђ,ИУКЏЪ§ЪЙгУDFTЫуЗЈ,ЖдгкаЁФкКЫдђжБНгМЦЫуЁЃ
вВПЩМћ,anchorЯрЕБгкзјБъжсЦНвЦЁЃ
ЦфжаddepthБэЪОФПБъЭМЯёЕФЫљашЩюЖШ,ЫќАќКЌгаЙиЭМЯёжаДцДЂЕФЪ§ОнРраЭЕФаХЯЂ,ПЩвдЪЧunsigned char(CV_8U),signed char(CV_8S),unsigned short(CV_16U)ЕШЕШ...
| Input depth (src.depth()) | Output depth (ddepth) |
|---|
| CV_8U | -1/CV_16S/CV_32F/CV_64F |
| CV_16U/CV_16S | -1/CV_32F/CV_64F |
| CV_32F | -1/CV_32F/CV_64F |
| CV_64F | -1/CV_64F |
?Note:ЕБddepth=-1ЪБ,БэЪОЪфГіЭМЯёгыдЭМЯёгаЯрЭЌЕФЩюЖШЁЃ
?
Р§зг
ЭМЯёФкКЫЪЧвЛИіаЁОиеѓ,гУгкгІгУФњПЩФмдкPhotoshopЛђGimpжаевЕНЕФаЇЙћ,Р§ШчФЃК§,ШёЛЏ,ТжРЊЛђИЁЕёЁЃЫќУЧЛЙгУгкЛњЦїбЇЯАжаЕФЁАЬиеїЬсШЁЁБ,етЪЧвЛжжгУгкШЗЖЈЭМЯёзюживЊВПЗжЕФММЪѕЁЃдкетжжЧщПіЯТ,ИУЙ§ГЬИќЦеБщЕиГЦЮЊЁАОэЛ§ЁБ(ВЮМћ:ОэЛ§ЩёОЭјТч)ЁЃ
гааэЖргаШЄЕФФкКЫ,ЯТУцвЛвЛНщЩм:
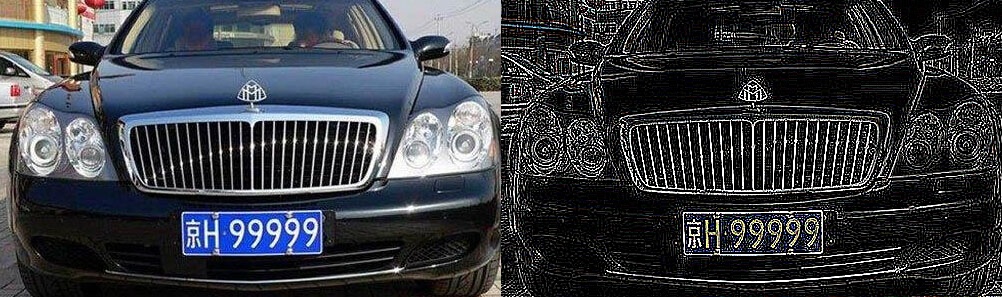
?1ЁЂФЃК§(blur)
ФЃК§ФкКЫЯћГ§СЫЯрСкЯёЫижЕжЎМфЕФВювьЁЃФкКЫШчЯТ:
| 0.0625 | 0.125 | 0.0625 |
| 0.125 | 0.25 | 0.125 |
| 0.0625 | 0.125 | 0.125 |
?
?
?
import cv2
import numpy as np
def solve():
src = cv2.imread("./Pictures/car001.jpg")
if src is None:
return -1
kernel = np.array((
[0.0625, 0.125, 0.0625],
[0.125, 0.25, 0.125],
[0.0625, 0.125, 0.0625]), dtype="float32")
dst = cv2.filter2D(src, -1, kernel)
htich = np.hstack((src, dst))
cv2.imwrite("./Pictures/car.jpg", htich)
cv2.imshow('merged_img', htich)
cv2.waitKey(0)
return 0
if __name__ == "__main__":
solve(
аЇЙћ:
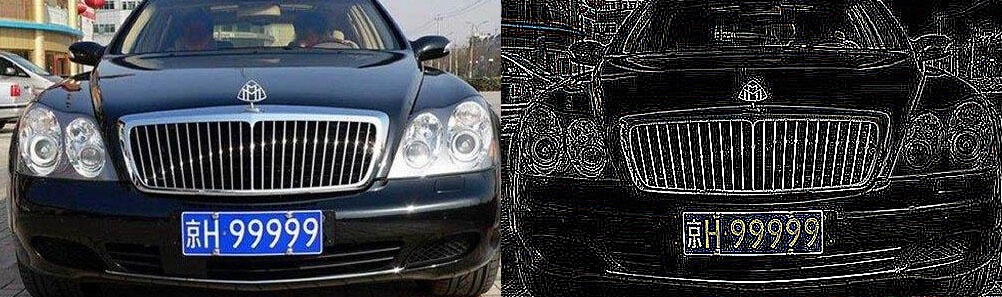
2ЁЂЫїБДЖћ(sobel)
sobelФкКЫгУгкНіЯдЪОЬиЖЈЗНЯђЩЯЯрСкЯёЫижЕЕФВювь,ЗжЮЊleft sobelЁЂright sobel(МьВтЬнЖШЕФЫЎЦНБфЛЏ)ЁЂtop sobelЁЂbuttom sobel(МьВтЬнЖШЕФДЙжББфЛЏ)ЁЃ
Р§Шч,buttom sobel
?
?
ДњТыгыЩЯУцРрЫЦ,жЛашаоИФkrenelЕФжЕЁЃ

3ЁЂИЁЕё(emboss)
ЭЈЙ§ЧПЕїЯёЫиЕФВюдкИјЖЈЗНЯђЕФGivensЩюЖШЕФДэОѕЁЃдкетжжЧщПіЯТ,бизХДгзѓЩЯЕНгвЯТЕФжБЯпЕФЗНЯђЁЃ
?
?
аЇЙћ:

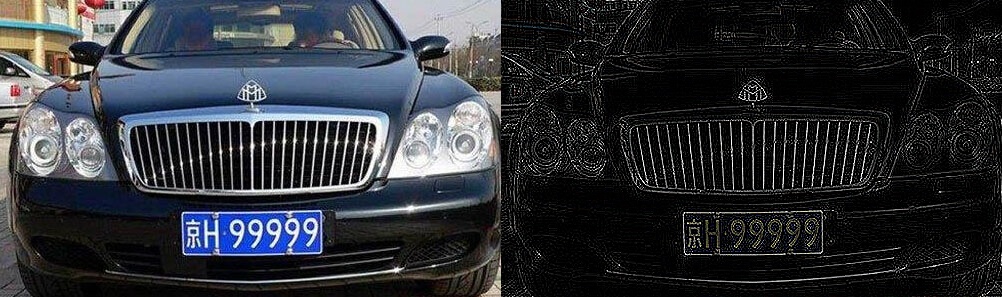
4ЁЂДѓИй(outline)
вЛИіТжРЊФкКЫ(вВГЦЮЊЁАБпдЕЁБЕФФкКЫ)гУгкЭЛГіЯдЪОЕФЯёЫижЕДѓЕФВювьЁЃОпгаНгНќЯрЭЌЧПЖШЕФЯрСкЯёЫиХдБпЕФЯёЫидкаТЭМЯёжаНЋЯдЪОЮЊКкЩЋ,ЖјгыЧПСвВЛЭЌЕФЯрСкЯёЫиЯрСкЕФЯёЫиНЋЯдЪОЮЊАзЩЋЁЃ
аЇЙћ:
5ЁЂШёЛЏ(sharpen)
ИУШёЛЏФкКЫЧПЕїдкЯрСкЕФЯёЫижЕЕФВювьЁЃетЪЙЭМЯёПДЦ№РДИќЩњЖЏЁЃ
?
?
аЇЙћ:

6ЁЂРЦеРЫЙЫузг(laplacian operator)
РЦеРЫЙЫузгПЩвдгУгкБпдЕМьВт,ЖдгкМьВтЭМЯёжаЕФФЃК§вВЗЧГЃгагУЁЃ
?
?
аЇЙћ:
7ЁЂЗжЩэ(identity)
етИіЗЧГЃМђЕЅ,ОЭЪЧдЭМ(ВЛПМТЧБпНчЪБ),How boring!
?
?
?
?
cs
