�Ա���װ����
Bվ��Ƶ����
��1���� Ӳ������
1.1Ӳ���嵥
| ��� | Ʒ�� | ���� |
|---|
| 1 | ODRIVE���� | 1 |
| 2 | CH340 USB TO TTL | 1 |
| 3 | MKS X2212��� | 1 |
| 4 | 12V 2.0A��Դ������ | 1 |
| 5 | ���� | 3 |
| 6 | ������������ | 1 |
| 7 | 50W 2ŷ ��ɢ���� | 1 |
| 8 | micro USB �� | 1 |
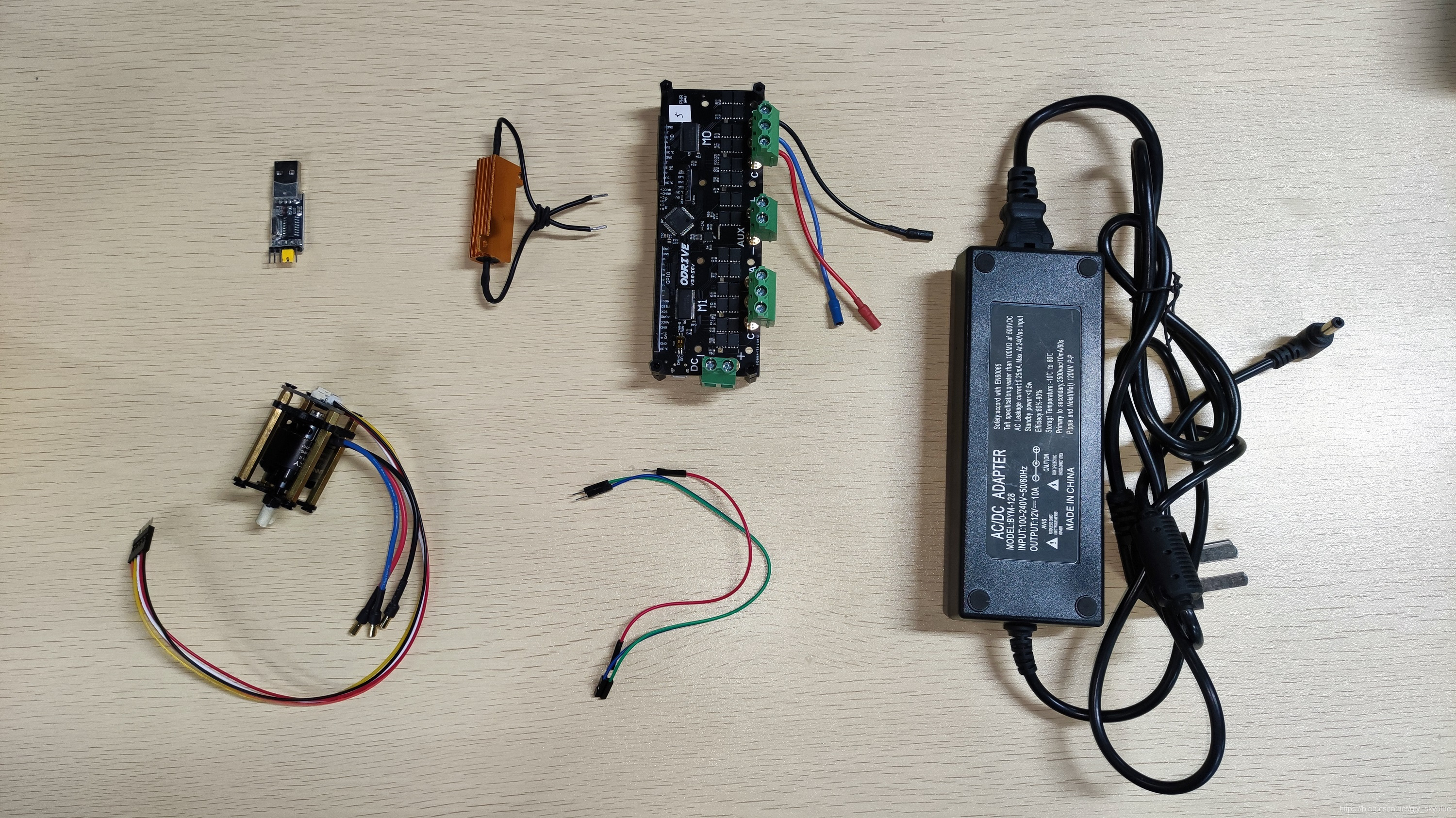
Ӳ���嵥����ͼ��ʾ��
1.2 Ӳ������
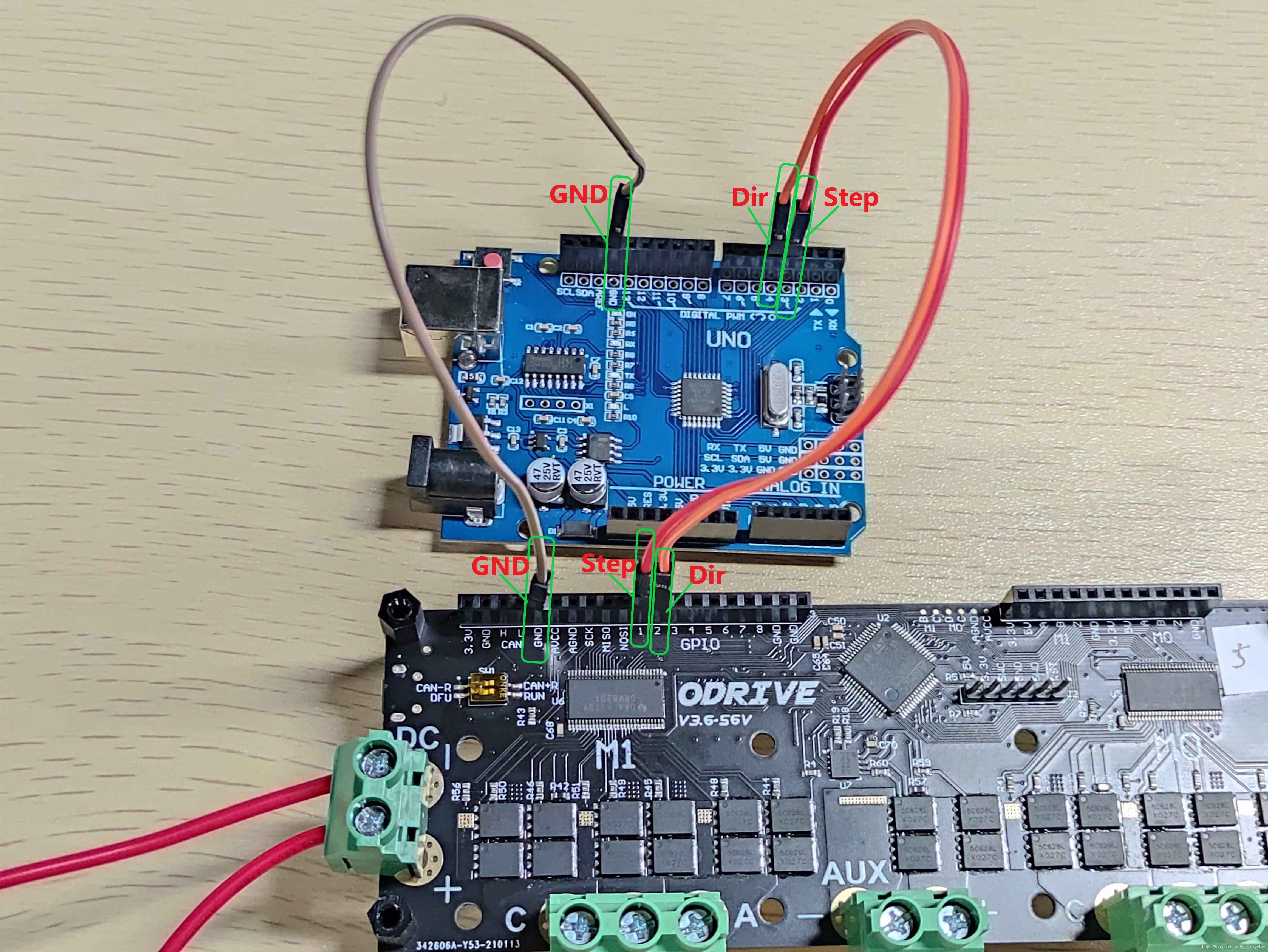
�����ODrive������߲ο�֮ǰ�γ�,�����Ҫ���ܵ���Arduino UNO������ODrive�����Step/Dir���ӡ�
-
ODrive�����GPIO1ΪAxis0 Step����,GPIO2ΪAxis0 Dir����;Arduino UNO�����ڱ��ν̳�������Ϊ������弰Dir���ơ�3�˿���Ϊ�������Ķ˿�;4�˿�ΪDir���ƶ˿�,���Ƶ���������±�����ʾ��
| ���� | ODrive���� | Arduino UNO���� |
|---|
| Step | GPIO1 | 3 |
| Dir | GPIO2 | 4 |
-
����������,һ������3����:
GPIO1----3,
GPIO2----4,
GND----GND������ͼ��ʾ��
-
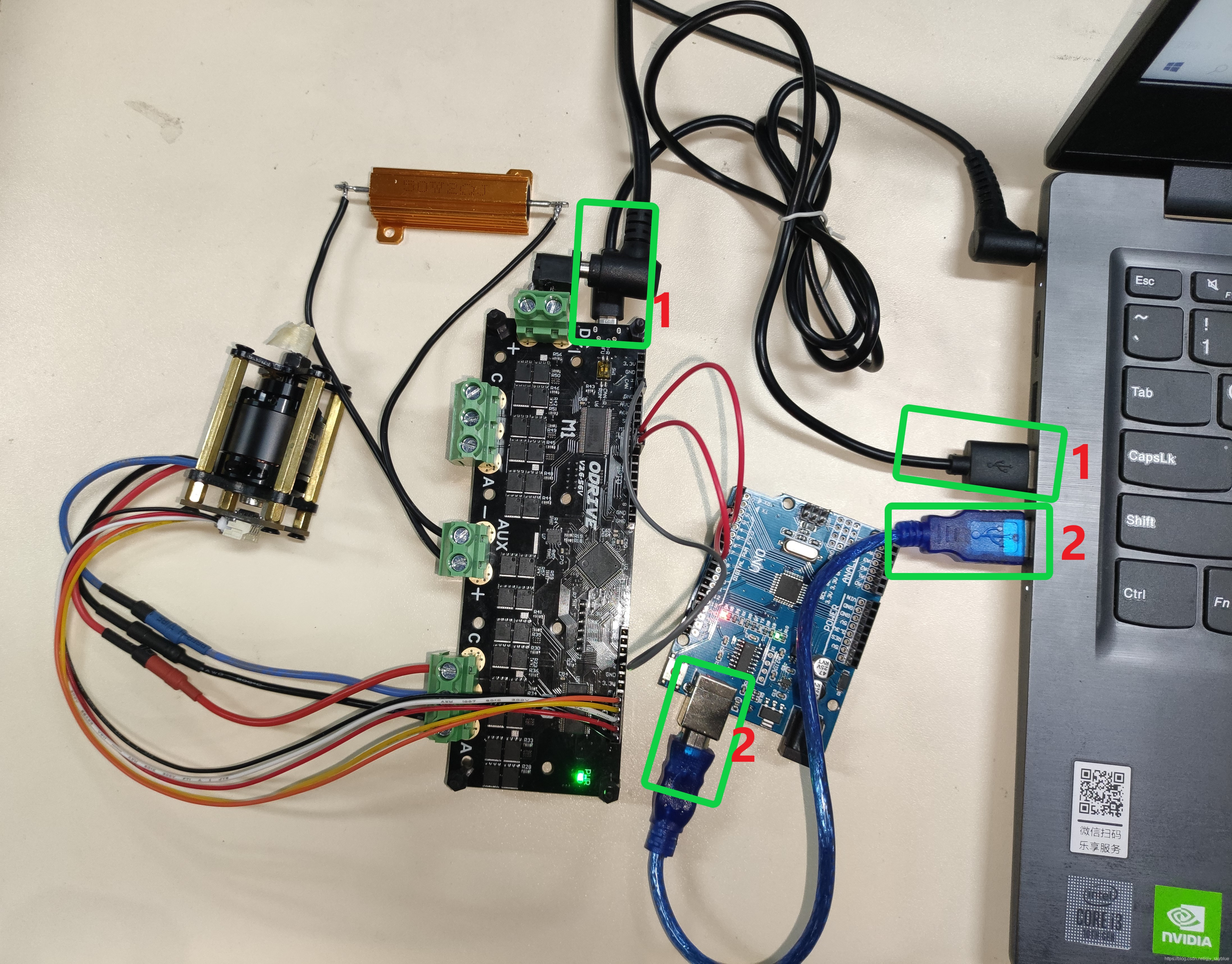
��USB�����߽�Arduino UNO������PC���ӡ�
-
micro USB ��һ������oDrive����,��һ������PC��
-
Ӳ����������ͼ��ʾ:
��2���� �����ļ�
-
���β���Դ�����ͨ��QȺ(732557609)����,����ͼ��ʾ��

-
��ѹ��Դ�����ļ�����ͼ��ʾ��
��3���� Step/Dir����
3.1 Step/Dir���ܼ��
-
��Ҫ����Step/Dir����,��ֹUART���ܡ�
-
ͨ������Ƶ����ÿȦ�������Ƶ��ת��,ͨ��Dir�ߵ͵�ƽ���Ƶ��ת������(Ĭ�ϲ���Ϊ1024(turns_per_step=1/1024),�����ÿ���յ�1024������ת��һȦ��)
-
���β��Էֱ�ͨ���ı�����Ƶ����ÿȦ��������֤ODrive��Step/Dir���ܡ�
3.2 Step/Dir��������
-
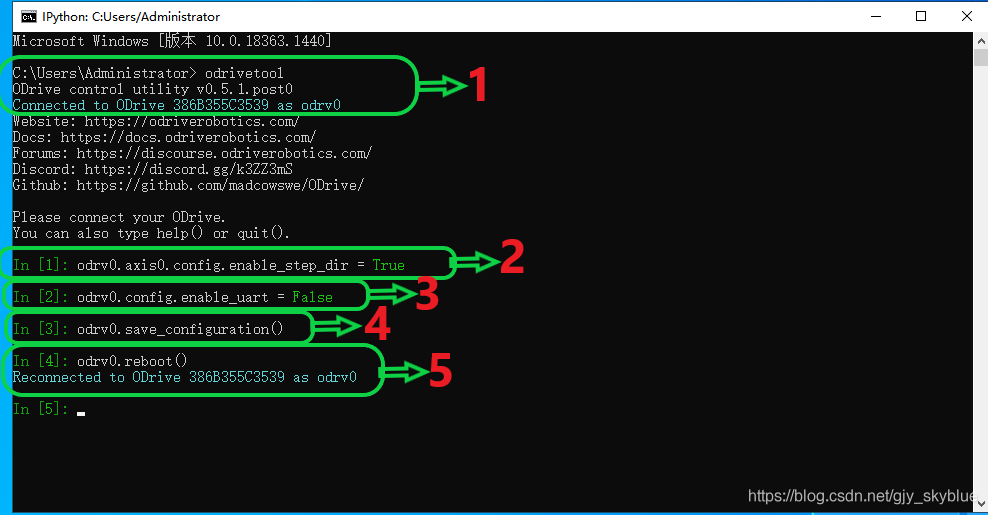
�������ն�,����odrivetool,����ͼ1��ʾ��
-
����Step/Dir����,����ͼ2��ʾ��
odrv0.axis0.config.enable_step_dir = True
-
����UART,����ͼ3��ʾ��
odrv0.config.enable_uart = False
-
����ÿȦ������
odrv0.axis0.config.turns_per_step = 1/1024
-
��������,����ͼ4��ʾ��
odrv0.save_configuration()
-
��������,����ͼ5��ʾ��
odrv0.reboot()
��4���� ����Ƶ�ʿ���ת��
�̶�ÿȦ������turns_per_step��Ϊ1/1024,
ͨ���ı�����Ƶ�������Ƶ��ת�١�
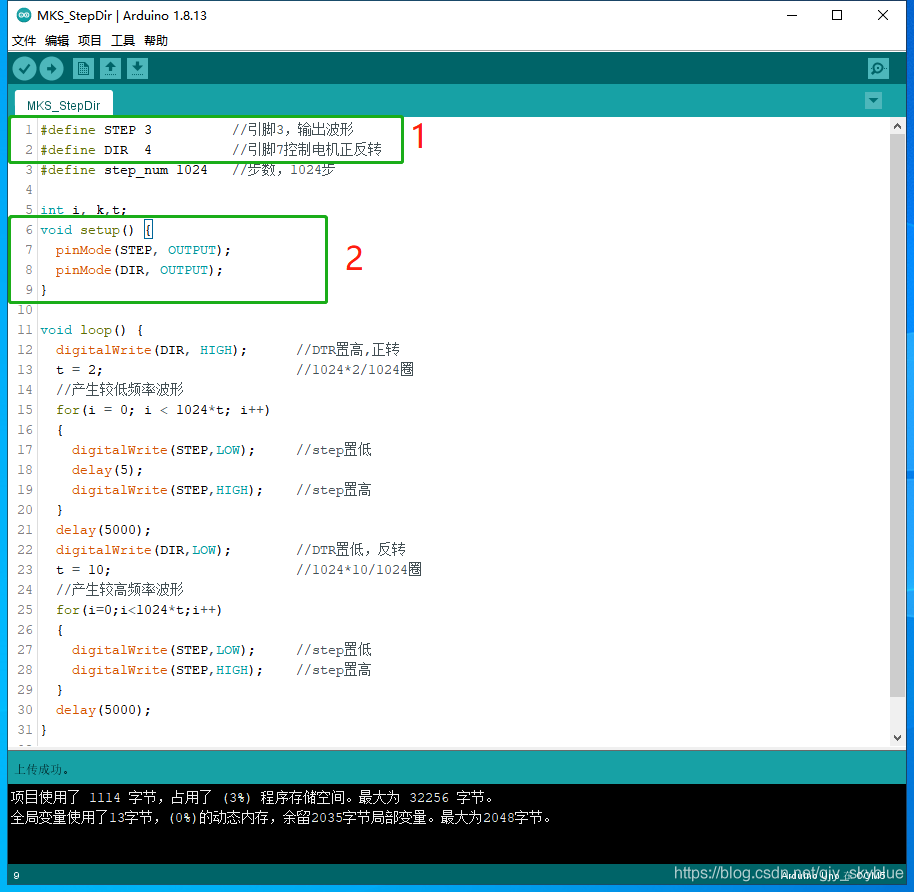
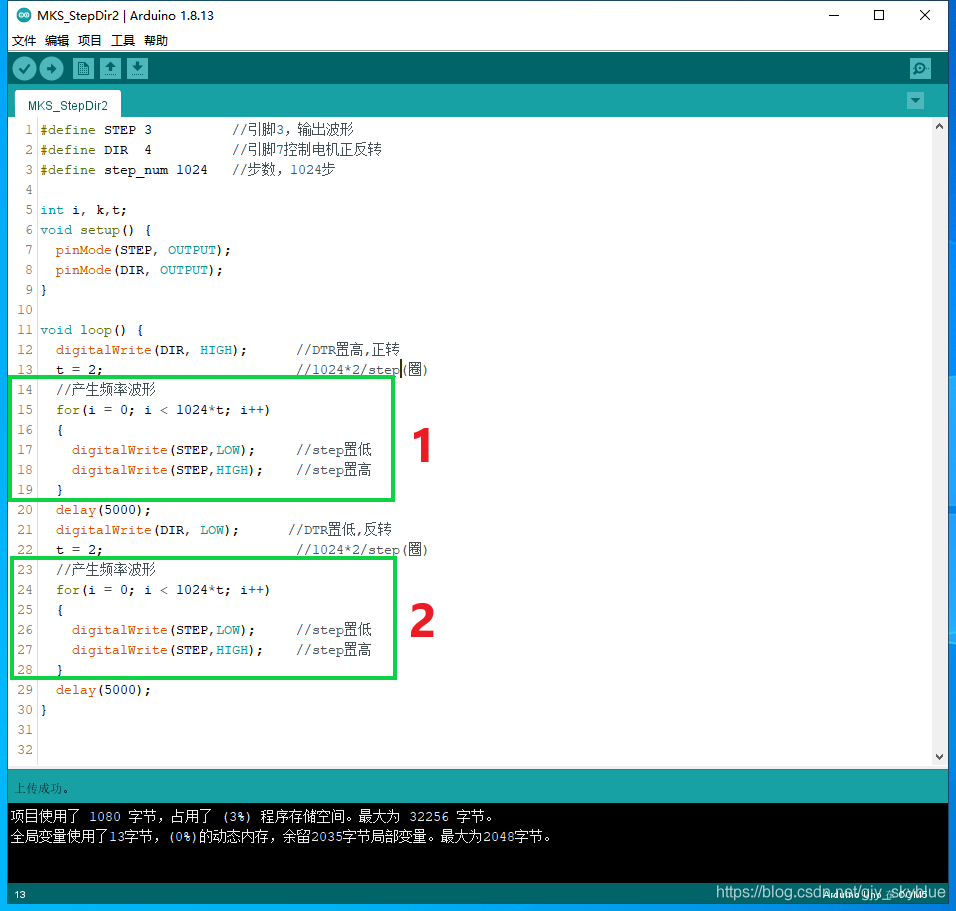
Դ������MKS_StepDirѹ����,��ѹ����,����ͼ��ʾ��

������������ͼ��ʾ��
������3����ΪStep��������˿�,
������4����ΪDir���ƶ˿�,����ͼ1��ʾ;
������3��4����Ϊ���ģʽ,����ͼ2��ʾ��
4.1 ��Ƶ������
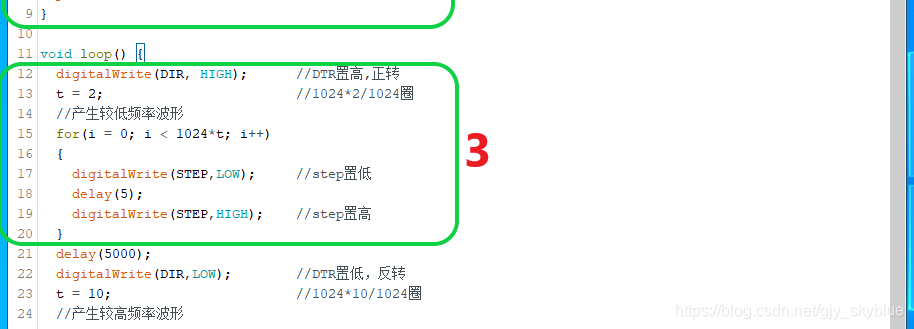
��Dir�����øߵ�ƽ,Step���������Ƶ������(delay(5)),��ͼ3��ʾ��
���Ƶ��������ת2Ȧ��
4.2 ��Ƶ������
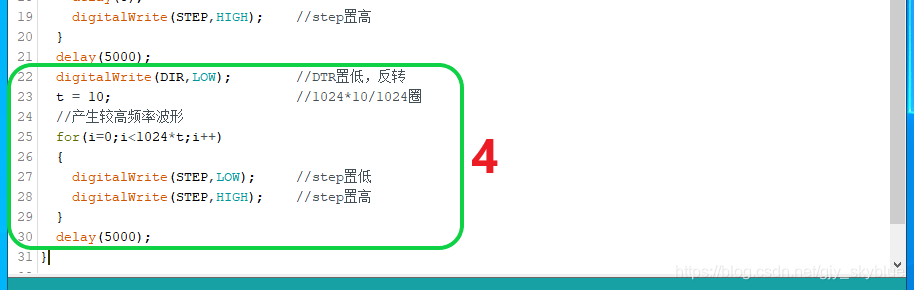
��Dir�����õ͵�ƽ,Step���������Ƶ������(delay(0)),��ͼ4��ʾ��
���Ƶ�����ٷ�ת10Ȧ��
4.3 ��������
�����ϴ��ɹ���,�����������ת2Ȧ,Ȼ����ٷ�ת10Ȧ,����ѭ���ö�����
��5���� ÿȦ��������ת��
�̶�����Ƶ��,ͨ���ı�ÿȦ���������Ƶ��ת�١�
Դ������MKS_StepDir2ѹ����,��ѹ����,����ͼ��ʾ��

-
����Ƶ�������Ϊһ��,����ͼ1,2��ʾ��
-
�ϴ�����
-
�����ϴ��ɹ���,�������ת2Ȧ,��ת2Ȧ,����ѭ���ö�����
-
�ϴ��������ϴ�����һ����Ҫ��ODrive GPIO���ý����ġ�
5.1 ����ÿȦ����Ϊ512
��ÿȦ������Ϊ512��,�������ò�����,����ͼ1��ʾ��
odrv0.axis0.config.turns_per_step = 1.0/512.0
odrv0.save_configuration()
odrv0.reboot()
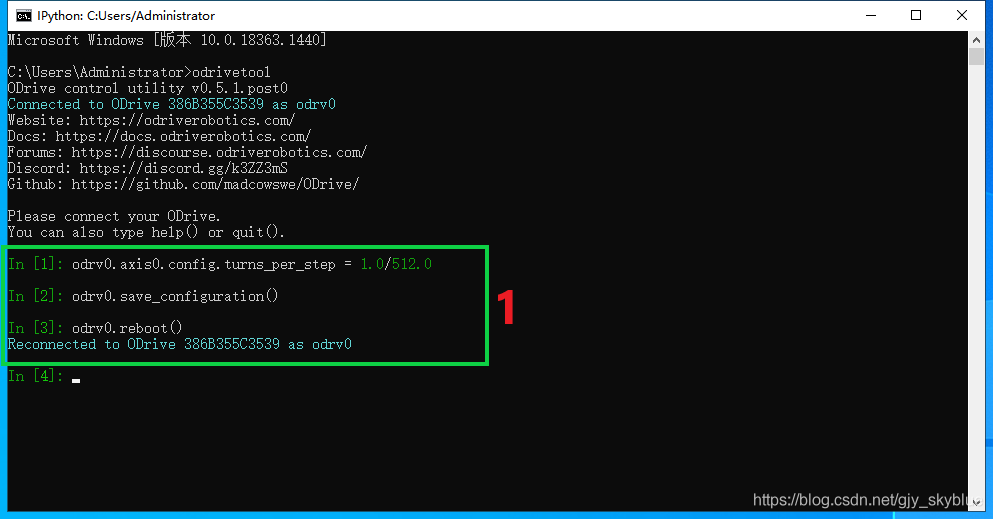
�۲���ת��,��ʱ���ת���Dz���Ϊ1024ʱ��2����
5.2 ����ÿȦ����Ϊ32
��ÿȦ������Ϊ32��,�������ò�����,����ͼ2��ʾ��
odrv0.axis0.config.turns_per_step = 1.0/32.0
odrv0.save_configuration()
odrv0.reboot()
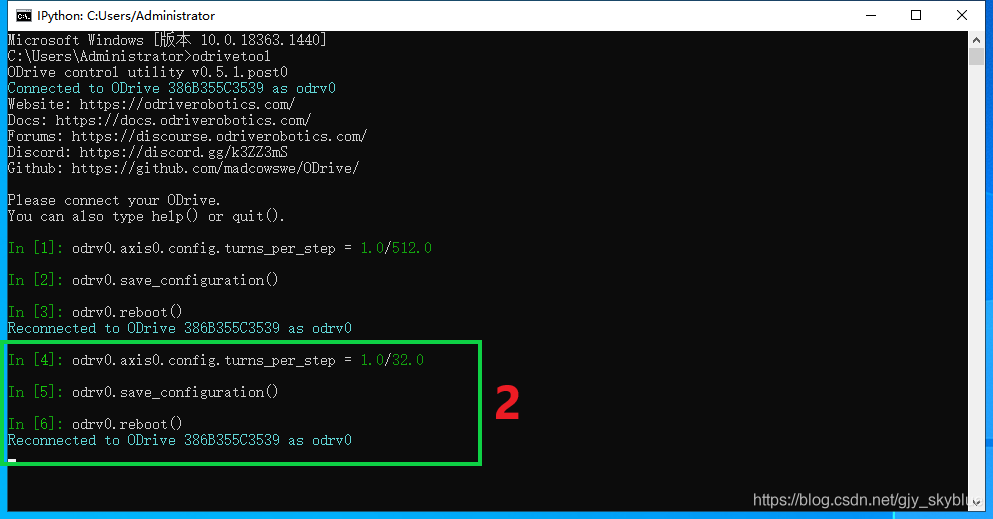
�۲���ת��,��ʱ���ת���Dz���Ϊ1024ʱ��32����
����,ODrive Step_Dir������ɡ�
���ͻ���oDrive���߿� ODrive Step_Dir���� ���˽�����
��Ӧ����Ƶ�γ�,����QȺ(732557609)����,��ӭ���롣
�������ע�����γ̡�

cs