��һ����,���Ǵ��µؽ�����һ��CPUFreq���û��ռ��sysfs�ӿں����ļ�����Ҫ�����ݽṹ,ͬʱҲ�ᵽ,CPUFreq��ϵͳ��һЩ�����Ĵ�������֯��һ��,������CPUFreq�ĺ��IJ���,��Щ��������CPUFreq�������ں�ģ���ṩ�˱�Ҫ��API,��cpufreq_governor��cpufreq_driver��ģ��ͨ����ЩAPI�����һ��������CPUFreq��ϵ����һ�����Ǿ�������һ�º��ļܹ��Ĵ���ܹ��Լ����ʹ����Щ������API�ӿڡ�
/*****************************************************************************************************/
ԭ������:https://blog.csdn.net/DroidPhone/article/details/9385745
/*****************************************************************************************************/
���IJ��ֵĴ��붼��:/drivers/cpufreq/cpufreq.c��,��ϵ��������ʹ�õ��ں˰汾��3.10.0.
1. CPUFreq��ϵͳ�ij�ʼ��
�ȿ�������Ĵ���:
static int __init cpufreq_core_init(void)
{
int cpu;
if (cpufreq_disabled())
return -ENODEV;
for_each_possible_cpu(cpu) {
per_cpu(cpufreq_policy_cpu, cpu) = -1;
init_rwsem(&per_cpu(cpu_policy_rwsem, cpu));
}
cpufreq_global_kobject = kobject_create_and_add("cpufreq", &cpu_subsys.dev_root->kobj);
BUG_ON(!cpufreq_global_kobject);
register_syscore_ops(&cpufreq_syscore_ops);
return 0;
}
core_initcall(cpufreq_core_init);
�ɼ�,��ϵͳ��������,����initcall����,cpufreq_core_init������,��������ɺ��IJ��ֵij�ʼ������,����:
**cpufreq_policy_cpu **��һ��per_cpu����,��smp��ϵͳ��,ÿ��cpu�������Լ������ĵ�Ƶpolicy,Ҳ�������е�cpu������һ��policy,��ʱ����п��ܳ�������һ��cpu������ij��policy,������cpu��ΪҲʹ��ͬһ��policy,��Щcpu��policy�ľͽ����Ǹ�����cpu����,���per_cpu��������������¼����cpu��policyʵ���������Ǹ�cpu���й����ġ���ʼ��ʱ������ʼ��Ϊ-1��,�������ڻ�û�п�ʼ����policy�Ĺ�����
��������kobject_create_and_add������/sys/devices/system/cpu����ڵ��½�����һ��cpufreq�ڵ�,�ýڵ�������Ժ���������õ�ǰgovernor��һЩ���ò���������cpu_subsys���ں˵�һ��ȫ�ֱ���,���ɸ����ڵij�ʼ��ʱ��ʼ����,������drivers/base/cpu.c��:
struct bus_type cpu_subsys = {
.name = "cpu",
.dev_name = "cpu",
};
EXPORT_SYMBOL_GPL(cpu_subsys);
void __init cpu_dev_init(void)
{
if (subsys_system_register(&cpu_subsys, cpu_root_attr_groups))
panic("Failed to register CPU subsystem");
cpu_dev_register_generic();
}
�⽫�Ὠ��һ��cpu����,�����¹���ϵͳ�����е�cpu,cpu�����豸�ĸ�Ŀ¼��λ��:/sys/devices/system/cpu,ͬʱ,/sys/bus��Ҳ�����һ��cpu�����߽ڵ㡣cpu�����豸�ĸ�Ŀ¼�»����γ���cpu0,cpu1,�� cpux�ڵ�,ÿ��cpu��Ӧ���е�һ���豸�ڵ㡣CPUFreq��ϵͳ�������cpu_subsys����ȡϵͳ�е�cpu�豸,������Щcpu�豸���潨����Ӧ��cpufreq����,��������ں��������ۡ�
��������,cpufreq��ϵͳ�ij�ʼ����ʵû����ʲô��Ҫ������,ֻ�dz�ʼ���˼���per_cpu�����ͽ�����һ��cpufreq�ļ��ڵ㡣��ͼ�dz�ʼ�����̵�����ͼ:
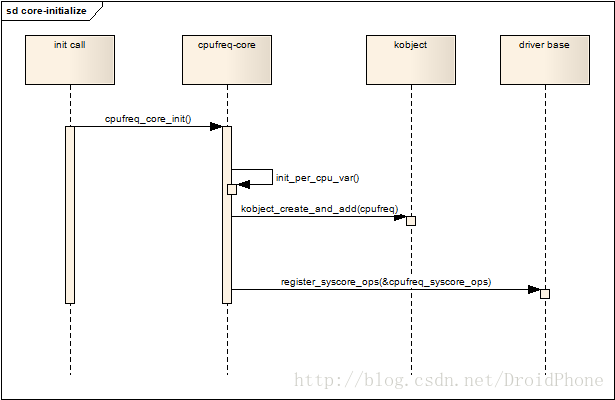
ͼ 1.1 ���IJ��ʼ��
2. ע��cpufreq_governor
ϵͳ�п���ͬʱ���ڶ��governor����,һ��policyͨ��cpufreq_policy�ṹ�е�governorָ���ij��governor�������Ҫ��һ��governor��policyʹ��,����Ҫ�Ѹ�governorע�ᵽcpufreq�ĺ�����,���ǿ���ͨ�����IJ��ṩ��API�����ע��:
int cpufreq_register_governor(struct cpufreq_governor *governor)
{
int err;
......
governor->initialized = 0;
err = -EBUSY;
if (__find_governor(governor->name) == NULL) {
err = 0;
list_add(&governor->governor_list, &cpufreq_governor_list);
}
......
return err;
}
���IJ㶨����һ��ȫ����������:cpufreq_governor_list,ע�ắ�����ȸ���governor������,ͨ��__find_governor()�������Ҹ�governor�Ƿ��ѽ���ע���,���û�б�ע���,��Ѵ�����governor�Ľṹ�����ӵ�cpufreq_governor_list�����С�����һƪ�������ᵽ,Ŀǰ���ں˰汾�ṩ��5��governor������ʹ��,���ǿ���ͨ���ں˵��������ѡ����Ҫ�����governor,ͬʱ��Ҫָ��һ��Ĭ�ϵ�governor����cpufreq.h��,�����������헵�ѡ��,��CPUFREQ_DEFAULT_GOVERNOR��ָ��Ĭ��governor�ṹ������ĵ�ַ,��ע��cpufreq_driver�Ľ���Ҫʹ����������趨ϵͳĬ��ʹ�õ�governor��
3. ע��һ��cpufreq_driver����
��governor��ͬ,ϵͳ��ֻ�����һ��cpufreq_driver����,������һƪLinux��̬Ƶ�ʵ���ϵͳCPUFreq֮һ:�����Ľ���,cpufreq_driver��ƽ̨��ص�,��������ʵʩƵ�ʵĵ�������,��ѡ����Ƶ�ʵIJ�������governor��ɵġ�����,ϵͳ��ֻ��Ҫע��һ��cpufreq_driver����,��ֻ����֪����ο��Ƹ�ƽ̨��ʱ��ϵͳ,�Ӷ��趨��governorȷ���Ĺ���Ƶ�ʡ�ע��cpufreq_driver�����ᴥ��cpufreq���ĵ�һϵ�ж���ij�ʼ������,��һ����˵�ĺ��ij�ʼ�������dz���,ʵ����,����ij�ʼ��������ע��cpufreq_driver����ɡ������ṩ��һ��API:cpufreq_register_driver�����ע�Ṥ�����������Ƿ���һ����������Ĺ�������:
int cpufreq_register_driver(struct cpufreq_driver *driver_data)
{
......
if (cpufreq_disabled())
return -ENODEV;
if (!driver_data || !driver_data->verify || !driver_data->init ||
((!driver_data->setpolicy) && (!driver_data->target)))
return -EINVAL;
��APIֻ��һ������:һ��cpufreq_driverָ��,driver_data,�ýṹ�����������Ĵ����ж���,���ø�APIʱ��Ϊ�������롣�������ж�ϵͳĿǰ�Ƿ��ֹ�˵�Ƶ����,Ȼ����cpufreq_driver�ļ����ص������Ƿ�ʵ��,�ɴ�����Կ���,verify��init�ص���������Ҫʵ��,��setpolicy��target�ص�������Ҫ��ʵ�����е�һ�����⼸���ص���������ο���ϵ�еĵ�һƪ���¡�������:
write_lock_irqsave(&cpufreq_driver_lock, flags);
if (cpufreq_driver) {
write_unlock_irqrestore(&cpufreq_driver_lock, flags);
return -EBUSY;
}
cpufreq_driver = driver_data;
write_unlock_irqrestore(&cpufreq_driver_lock, flags);
���ȫ�ֱ���cpufreq_driver�Ƿ��Ѿ�����ֵ,���û��,����IJ�������ֵ��ȫ�ֱ���cpufreq_driver,�Ӷ���֤��ϵͳ��ֻ��ע��һ��cpufreq_driver������Ȼ��:
ret = subsys_interface_register(&cpufreq_interface);
......
......
register_hotcpu_notifier(&cpufreq_cpu_notifier);
ͨ��subsys_interface_register��ÿһ��cpu����һ��cpufreq_policy,���ע��cpu hot plug֪ͨ,�Ա���cpu hot plug��ʱ��,�ܹ���̬�ش�������cpu policy֮��Ĺ�ϵ(����Ǩ�Ƹ��������cpu�ȵ�)������Ҫ�ص�����һ��subsys_interface_register�Ĺ���,�ص���һ�ڵ�����,����֪����ʼ����,cpu_subsys������,�Ӷ�ÿ��cpu������cpu�����豸�½���һ�������Լ����豸:sys/devices/system/cpu/cpux��subsys_interface_register������cpu_subsys��ϵͳ�����豸����ע�ṫ���Ľӿڡ����ǿ�������cpufreq_interface�Ķ���:
static struct subsys_interface cpufreq_interface = {
.name = "cpufreq",
.subsys = &cpu_subsys,
.add_dev = cpufreq_add_dev,
.remove_dev = cpufreq_remove_dev,
};
subsys_interface_register�����Ĵ����ҾͲ���չ����,���Ĵ������þ���:������ϵͳ�����ÿһ�����豸,Ȼ����������豸��Ϊ����,����cpufrq_interface�ṹ��add_dev�ص�����,����Ļص�������ָ����cpufreq_add_dev,���ľ��幤����ʽ��������һ�������ۡ�
driverע����ɺ�,������������ȫ�ֱ���cpufreq_driver��,�����IJ�ʹ��,ͬʱ,ÿ��cpuҲ�Ὠ���Լ���policy����,governorҲ��ʼ����,ʵʱ�ؼ����cpu�ĸ��ز�������ʵĹ���Ƶ��,Ȼ��ͨ��driver���������Ĺ���Ƶ�ʡ���ͼ��cpufreq_driverע����̵�����ͼ:
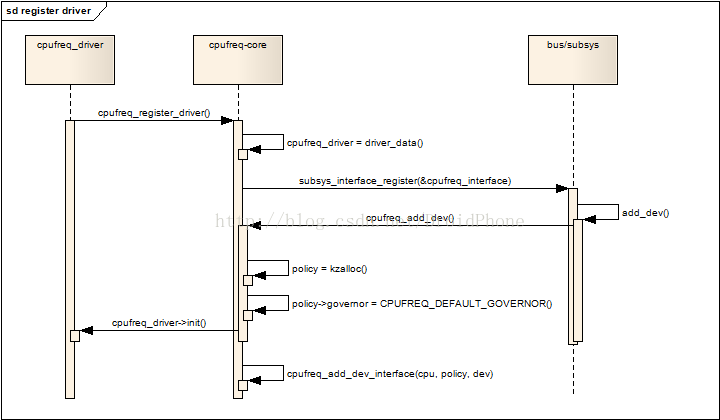
ͼ 3.1 cpufreq_driver��ע�����
4. Ϊÿ��cpu����Ƶ�ʵ�������(policy)
Ϊÿ��cpu����Ƶ�ʵ�������ʵ��ע��cpufreq_driver�ε�subsys_interface_registe��������ɵ�,��һ���Ѿ��ᵽ,�ú������ջ����cpufreq_add_dev�ص�����,����չ�������������һ��:
��Ϊsubsys_interface_registe��ö�ٸ���cpu�豸,���ܸ�cpu����offline����online״̬,cpufreq_add_dev���ᱻ����,���Ժ�����һ��ʼ,�ж����cpu����offline״̬,ֱ�ӷ��ء�
static int cpufreq_add_dev(struct device *dev, struct subsys_interface *sif)
{
......
if (cpu_is_offline(cpu))
return 0;
�����smpϵͳ,��cpu��policy���ܺ�����cpu��ͬʹ��ͬһ��policy,��ί����һ����������cpu��cpu���й���,����Ĵ����ж��������,����Ѿ�ί�б��cpu����,��ֱ�ӷ���,���IJ㶨������һ��per_cpu����:cpufreq_cpu_data,�����������cpu��ʹ�õ�cpufreq_policy�ṹ��ָ��,cpufreq_cpu_get����ʵ���Ͼ���ͨ�����per_cpu����,��ȡ��ָ��,�����ָ���0,������cpu�Ѿ�����������������policy(����������֮ǰ�Ĺ���cpu����policy�ڼ�һ��������)��
policy = cpufreq_cpu_get(cpu);
if (unlikely(policy)) {
cpufreq_cpu_put(policy);
return 0;
}
��Ϊcpu hot plug�ڼ�,cpufreq_add_devҲ�ᱻ����,����Ĵ���Ƭ�μ���cpu֮ǰ�Ƿ�hot-unpluged��,�����,�ҵ�����һ����ص�cpu(��Щ��ص�cpu��ί�и�ͬһ���й���cpu���й���,����cpufreq_add_policy_cpu����,�ú���ֻ�Ǽؽ���һ��cpufreq����,���ӵ�����cpu��cpufreq�ڵ㡣
for_each_online_cpu(sibling) {
struct cpufreq_policy *cp = per_cpu(cpufreq_cpu_data, sibling);
if (cp && cpumask_test_cpu(cpu, cp->related_cpus)) {
read_unlock_irqrestore(&cpufreq_driver_lock, flags);
return cpufreq_add_policy_cpu(cpu, sibling, dev);
}
}
������ϵͳ��ʼ���ε�һ�ε���cpufreq_add_devʱ(subsys_interface_registerö�ٵ��ĵ�һ��cpu,ͨ������cpu0),cpufreq_cpu_dataӦ��ΪNULL,��������ҪΪ������cpu����һ��cpufreq_policy�ṹ,����ʼ����policy��������cpu,����online��cpus�ֶκ�online+offline��cpu_related�ֶ�,�����Լ�����Ϊ���policy�Ĺ���cpu,ʹ��Ĭ��governor��ʼ��policy->governor�ֶ�,ͬʱ���Լ����뵽online��cpus�ֶ���:
policy = kzalloc(sizeof(struct cpufreq_policy), GFP_KERNEL);
if (!policy)
goto nomem_out;
if (!alloc_cpumask_var(&policy->cpus, GFP_KERNEL))
goto err_free_policy;
if (!zalloc_cpumask_var(&policy->related_cpus, GFP_KERNEL))
goto err_free_cpumask;
policy->cpu = cpu;
policy->governor = CPUFREQ_DEFAULT_GOVERNOR;
cpumask_copy(policy->cpus, cpumask_of(cpu));
per_cpu(cpufreq_policy_cpu, cpu) = cpu;
��������ʼ��һ����kobjectϵͳע��ʱʹ�õ�ͬ������,��ʼ��һ��workqueue,ijЩʱ��������ִ�жԸ�policy�ĸ��²���,����ʹ�ø�workqueue���ӳ�ִ�С�
init_completion(&policy->kobj_unregister);
INIT_WORK(&policy->update, handle_update);
����,����cpufreq_driver��init�ص�,��һ����ʼ����policy:
ret = cpufreq_driver->init(policy);
if (ret) {
pr_debug("initialization failed\n");
goto err_set_policy_cpu;
}
�����������ij�ʼ���ڲ�,Ӧ��������¹���:
- �趨��cpu��������С����Ƶ��
- �趨��policy��������С����Ƶ��
- �趨��policy�ɹ����ڵ�Ƶ�ʵ�λ
- �趨cpu����Ƶ��ʱ���ӳ�ʱ������
- ��policy���Թ�����cpu����(policy->cpus)
����:
cpumask_or(policy->related_cpus, policy->related_cpus,