CPU��Դ��ʱ�ָ���
�����л�:CPU��Դ�ĵ�ǰռ�����л�
- ���浱ǰ������PCB�е�ִ��������(CPU״̬)
- �ָ���һ�����̵�ִ��������
����������
- �Ӿ�����������ѡ��һ��ռ��CPU���еĽ���
- �Ӷ������CPU����ѡ�������̿�ʹ�õ�CPU��Դ
���ȳ���:��ѡ�������̵��ں˺���
- ���Ȳ���,����ʲôԭ����ѡ����/�߳�?
- ����ʱ��,ʲôʱ����е���?
����ʱ��:�ڽ���/�̵߳����������е�ʲôʱ����е���?
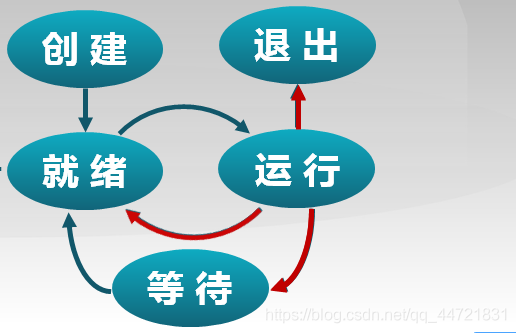
�ں����е��ȳ��������
- ���̴�����״̬�л����ȴ�״̬
- ���̱��ս���
����ռϵͳ
����ռϵͳ
- �ж�������������Ӧ���ʱ
- ��ǰ���̱���ռ,����ʱ��Ƭ����,���̴ӵȴ��л�������
���Ȳ���
���Ȳ���:ȷ����δӾ���������ѡ����һ��ִ�н���
���Ȳ���Ҫ���������
- ��ѡ���������е���һ������?
- ͨ��ʲô��������ѡ��?
�����㷨:�ڵ��ȳ�����ʵ�ֵĵ��Ȳ���
�Ƚϵ����㷨����:��һ������/�㷨�Ϻ�?
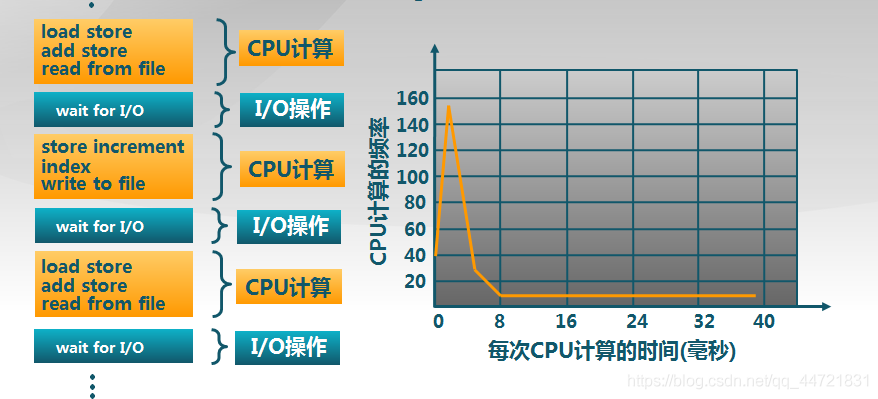
��������Դ��ʹ��ģʽ
������CPU�����I/O�����佻��
- ÿ�ε��Ⱦ�������һ��CPU����ʱ���ĸ���������CPU
- ��ʱ��Ƭ������,���̿����ڽ�����ǰCPU����ǰ���ȷ���CPU
�Ƚϵ����㷨����
CPUʹ����:CPU����æ״̬��ʱ��ٷֱ�
������:��λʱ������ɵĽ�������
��תʱ��:���̴ӳ�ʼ��������(�����ȴ�)����ʱ��
�ȴ�ʱ��:�����ھ��������е���ʱ��
��Ӧʱ��:���ύ��������Ӧ�����ѵ���ʱ��
���������ӳ�
�����㷨��Ҫ��
ʲô�Ǹ���?
�����ļ�ʱ�ĸߴ���,�����㷨�ĸ�������������Ϸʱ�ĵ��ӳ�,�����㷨�ĵ���Ӧ�ӳ١������������Ƕ����ġ���ˮ�ܵ���ȡ�
���ӳ�:��ˮ��ʱ����Ҫһ��ˮ��ͷˮ����������
�ߴ���:����Ӿ�س�ˮʱϣ����ˮ��ͷ��ͬʱ����������ˮ,���Ҳ������Ƿ�����ӳ١�
���������Ȳ��Ե���Ӧʱ��Ŀ��
������Ӧʱ������ʱ�����û�����������,���콫����������û�
����ƽ����Ӧʱ��IJ������ڽ���ϵͳ��,��Ԥ���Աȸ߲����ƽ������Ҫ
���ӳٵ��ȸ������û��Ľ������顣����ƶ����ʱ,��Ļ�еĹ��û��,�û����ܻ���������
��Ӧʱ���Dz���ϵͳ�ļ����ӳ١�
���������Ȳ��Ե�������Ŀ��
����������
- ���ٿ���(����ϵͳ����,�������л�)
- ϵͳ��Դ�ĸ�Ч����(CPU,I/O�豸)
���ٵȴ�ʱ��������ÿ�����̵ĵȴ�ʱ��
����ϵͳ��Ҫ��֤�����������û�������Ӱ�졣����ϵͳ���벻ʱ���е���,��ʹ�������ཻ������
�������Dz���ϵͳ�ļ������
���������ȵĹ�ƽ��Ŀ��
��ƽ�Ķ���:
- ��֤ÿ������ռ����ͬ��CPUʱ��
- ��֤ÿ�����̵ĵȴ�ʱ����ͬ
��ƽͨ��������ƽ����Ӧʱ��
�����㷨
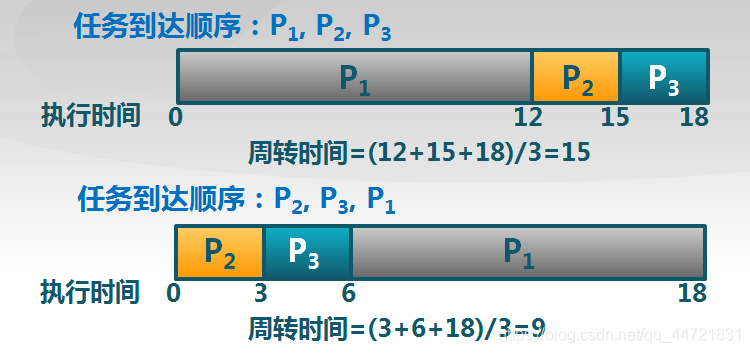
1�������ȷ����㷨(First Come First Served, FCFS)
���ݽ��̽������״̬���Ⱥ�˳������
���̽���ȴ������״̬ʱ,���������е���һ������ռ��CPU
FCFS�㷨����תʱ��,ʾ��:3������,����ʱ��ֱ�Ϊ12,3,3
�����ȷ����㷨������
�ŵ�:��
ȱ��:
- ƽ���ȴ�ʱ�䲨���ϴ�,�̽��̿������ڳ����̺��档
- I/O��Դ��CPU��Դ�������ʽϵ�,CPU�ܼ��ͽ��̻ᵼ��I/O�豸����ʱ,I/O�ܼ��ͽ���Ҳ�ȴ���
2���̽��������㷨(SPN: Shortest Process Next)
ѡ�����������ִ��ʱ����̽���ռ��CPU��������״̬,�������а�Ԥ�ڵ�ִ��ʱ��������
�̽��������㷨������:ȱ��
���ܵ��¼���,�����Ķ̽�������ʹ�����������CPU��Դ
��ҪԤ֪δ��:
���Ԥ����һ��CPU����ij���ʱ��?
�Ľ���취:ѯ���û�,�û���֪����ô��?
3�������Ӧ�������㷨(HRRN: Highest Response Ratio Next)
ѡ�������������Ӧ��Rֵ��ߵĽ���
R=(w+s)/s
w: �ȴ�ʱ��(waiting time)
s: ִ��ʱ��(service time)
�ڶ̽��������㷨�Ļ����ϸĽ�
������ռ
��ע���̵ĵȴ�ʱ��
��ֹ�������Ƴ�
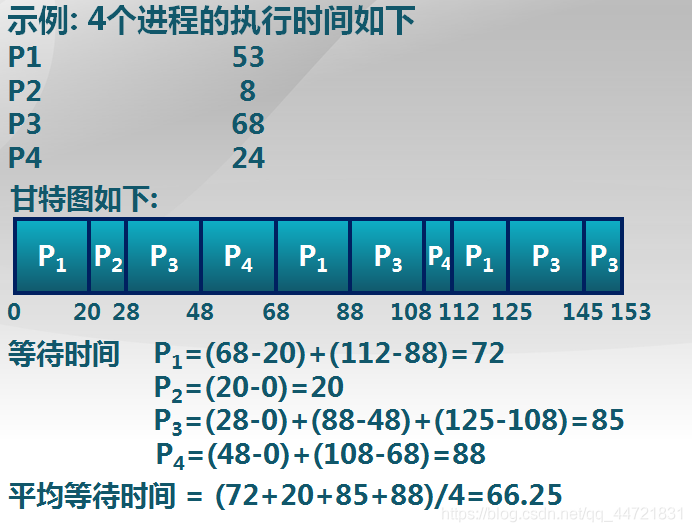
4��ʱ��Ƭ��ת�㷨(RR: Round Robin)
ʱ��Ƭ:���䴦������Դ�Ļ���ʱ�䵥Ԫ
�㷨˼·:
- ʱ��Ƭ����ʱ,��FCFS�㷨�л�����һ����������
- ÿ��(n �C 1)��ʱ��Ƭ����ִ��һ��ʱ��Ƭq
ʱ��ƬΪ20��RR�㷨ʾ��
ʱ��Ƭ��ת�㷨�е�ʱ��Ƭ����
RR�㷨����(������������л�)
ʱ��Ƭ̫��(�ȴ�ʱ�����,��������˻���FCFS)
ʱ��Ƭ̫С(��ӦѸ��,�����������������л�,�����������л�����Ӱ�쵽ϵͳ������)
ʱ��Ƭ����ѡ��Ŀ��
- ѡ��һ�����ʵ�ʱ��Ƭ����
- �������:ά���������л���������1%����
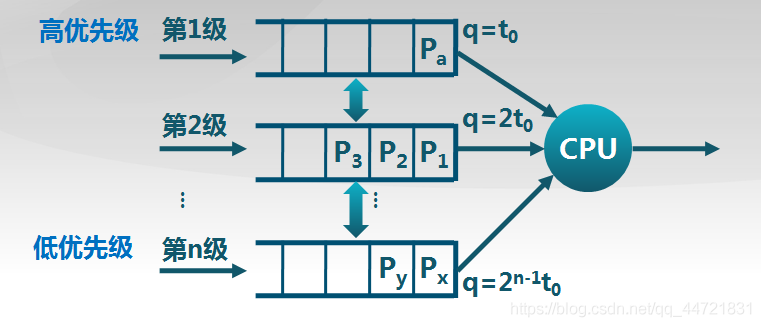
5���༶���������㷨(MFQ: Multilevel Feedback Queues)
�������б����ֳɶ���������Ӷ���,��:ǰ̨(����)����̨(������)
ÿ������ӵ���Լ��ĵ��Ȳ���,��:ǰ̨-RR����̨-FCFS
���м�ĵ���
- �̶����ȼ�
�ȴ���ǰ̨,Ȼ������̨
���ܵ��¼��� - ʱ��Ƭ��ת
ÿ�����ж��õ�һ��ȷ�����ܹ���������̵�CPU��ʱ��
��:80%CPUʱ������ǰ̨,20%CPUʱ�����ں�̨
���̿��ڲ�ͬ���м��ƶ��Ķ༶�����㷨
- ʱ��Ƭ��С�����ȼ��������Ӷ�����
- ������ڵ�ǰ��ʱ��Ƭû�����,���©`�����ȼ�
MLFQ�㷨������
- CPU�ܼ��ͽ��̵����ȼ��½��ܿ�
- I/O���ͽ���ͣ���ڸ����ȼ�
6����ƽ���������㷨(FSS: Fair Share Scheduling)
FSS�����û���ϵͳ��Դ�ķ���
- һЩ�û���������û������Ҫ
- ��֤����Ҫ������¢����Դ
- δʹ�õ���Դ����������
- û�дﵽ��Դʹ����Ŀ������ø��ߵ����ȼ�
��ͳ�����㷨�ܽ�
�����ȷ����㷨
�̽��������㷨
- ����ƽ,ƽ����תʱ����С
- ��Ҫ��ȷԤ�����ʱ��
- ���ܵ��¼���
�����Ӧ�������㷨
ʱ��Ƭ��ת�㷨
�༶��������
��ƽ��������
ʵʱ����ϵͳ
ʵʱ����ϵͳ�Ķ���:��ȷ����������ʱ�����������IJ���ϵͳ
ʵʱ����ϵͳ������ָ��
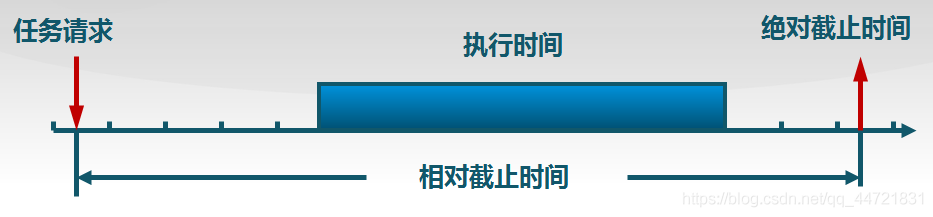
- ʱ��Լ���ļ�ʱ��(deadlines)
- �ٶȺ�ƽ��������Բ���Ҫ
ʵʱ����ϵͳ������:ʱ��Լ���Ŀ�Ԥ����
ʵʱ����ϵͳ����
ǿʵʱ����ϵͳ:Ҫ����ָ����ʱ���ڱ��������Ҫ������
��ʵʱ����ϵͳ:��Ҫ�����и����ȼ�,Ҫ�������DZ������
ʵʱ����
����(������Ԫ):һ�μ���,һ���ļ���ȡ,һ����Ϣ���ݵȵ�
��������:�����������Ҫ����Դ,��ʱ����
����ʵʱ����
����ʵʱ����:һϵ�����Ƶ�����
- �����й��ɵ��ظ�
- ����p = ��������ʱ���� (0 <p)
- ִ��ʱ��e = ���ִ��ʱ��(0 < e < p)
- ʹ����U = e/p
��ʱ��Ӳʱ��
Ӳʱ��(Hard deadline)
- ��������ʱ�ᵼ�������Ի�dz����صĺ��
- ������֤,���������ܹ�����ʱ��
��ʱ��(Soft deadline)
- ͨ������������ʱ��,����ʱ��������,��Ҫ��
- ������֤��������ʱ��
�ɵ�����
�ɵ��ȱ�ʾһ��ʵʱ����ϵͳ�ܹ���������ʱ��Ҫ��
- ��Ҫȷ��ʵʱ�����ִ��˳��
- ��̬���ȼ�����
- ��̬���ȼ�����
ʵʱ����
���ʵ��������㷨(RM, Rate Monotonic)
- ͨ�����ڰ������ȼ�
- ����Խ�����ȼ�Խ��
- ִ��������̵�����
�����ֹʱ�������㷨 (EDF, Earliest Deadline First)
- ��ֹʱ��Խ�����ȼ�Խ��
- ִ�н�ֹʱ�����������
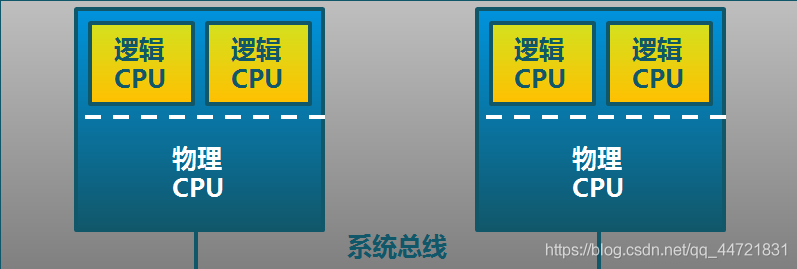
�ദ��������
�ദ�������ȵ�����
- ������������һ���ദ����ϵͳ
- ��������ɸ��ع���
�Գƶദ����(SMP, Symmetric multiprocessing)����
- ÿ�������������Լ��ĵ��ȳ���
- ���ȳ���Թ�����Դ�ķ�����Ҫ����ͬ��
�Գƶദ�����Ľ��̷���
��̬���̷���
- ���̴ӿ�ʼ�������������䵽һ���̶��Ĵ�������ִ��
- ÿ�����������Լ��ľ�������
- ���ȿ���С
- ������������æ�в���
��̬���̷���
- ������ִ���пɷ��䵽������д�����ִ��
- ���д���������һ�������ľ�������
- ���ȿ�����
- ���������ĸ����Ǿ����
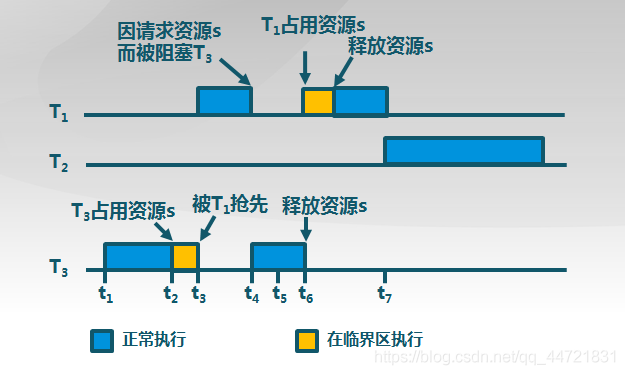
���ȼ�����(Priority Inversion)
����ϵͳ�г��ָ����ȼ����̳�ʱ��ȴ������ȼ�������ռ����Դ������
�������ȼ��Ŀ���ռ�����㷨�������ȼ�����
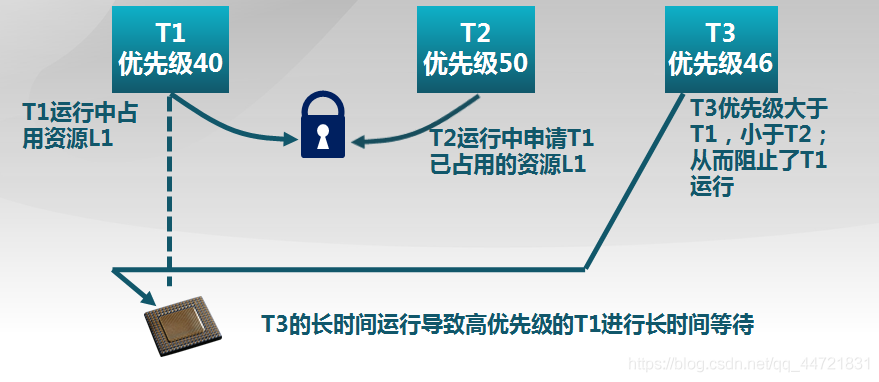
���ȼ��̳�(Priority Inheritance)
ռ����Դ�ĵ����ȼ����̼̳�������Դ�ĸ����ȼ����̵����ȼ�
ֻ��ռ����Դ�ĵ����ȼ����̱�����ʱ,�����ռ����Դ���̵����ȼ�
���ȼ��컨��Э��(priority ceiling protocol)
ռ����Դ���̵����ȼ������п����������Դ�Ľ��̵�������ȼ���ͬ
- �����Ƿ����ȴ�,������ռ����Դ���̵����ȼ�
- ���ȼ�����ϵͳ�����б���������Դ�����ȼ�����,����ִ���ٽ���ʱ�Ͳ��ᱻ����
cs