关于任务通知特点、优缺点: FreeRTOS任务通知
关于二值信号量特点、本质:二值信号量使用

?ulTaskNotifyTake() ??????????? 替代 ? ? ?? xSemaphoreTake()
xTaskNotifyGive()?????????????? 替代??????? xSemaphoreGive()
vTaskNotifyGiveFromISR?? 替代??????? xSemaphoreGiveFromISR()
?API说明
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
//发送任务通知,返回值永远是pdTRUE参数xTaskToNotify是任务句柄,既要发向的任务
void vTaskNotifyGiveFromISR( TaskHandle_t xTaskHandle, BaseType_t *pxHigherPriorityTaskWoken );
//同上,用于中断中
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
//获取任务通知,返回值是任务通知值,参数xClearCountOnExit为pdTRUE表示用作二值信号量,为pdFALSE表示用作计数信号量
测试程序
总体设计:3个任务,1个中断
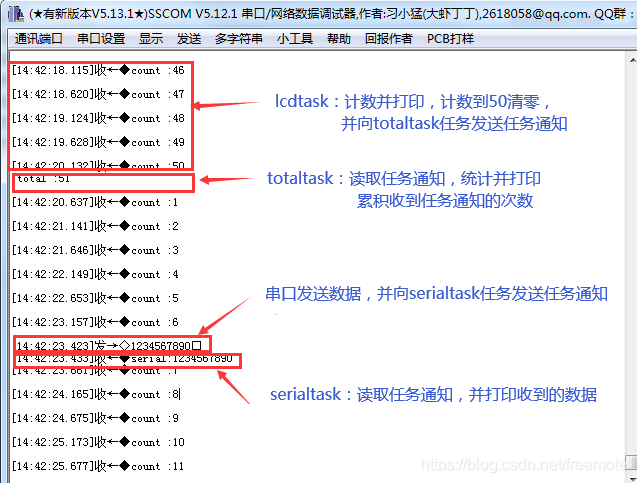
lcdtask:计数,LCD显示并打印,计数到50的时候,发送任务通知给任务totaltask;
totaltask:读取任务通知,并打印累积读取到的次数;
serialtask:读取任务通知,并打印收到的数据;
串口中断:空闲中断后,发送任务通知给任务serialtask。
创建任务
#define LCD_TASK_PRIO 1 //任务优先级
#define LCD_TASK_STK_SIZE 80 //任务堆栈大小
TaskHandle_t LCDTaskHandler; //任务句柄
void LCDTaskFunc(void *pvParameters); //任务函数、
#define TOTAL_COUNT_TASK_PRIO 2 //任务优先级
#define TOTAL_COUNT_TASK_STK_SIZE 50 //任务堆栈大小
TaskHandle_t TotalCountTaskHandler; //任务句柄
void TotalCountTaskFunc(void *pvParameters); //任务函数
#define SERIAL_TASK_PRIO 4 //任务优先级
#define SERIAL_TASK_STK_SIZE 80 //任务堆栈大小
TaskHandle_t SerialTaskHandler; //任务句柄
void SerialTaskFunc(void *pvParameters); //任务函数
void OtherTest(void )
{
BaseType_t ret;
BoardInitMcu();
BoardInitPeriph();
ret=xTaskCreate((TaskFunction_t )LCDTaskFunc,
(const char* )"lcdtask",
(uint16_t )LCD_TASK_STK_SIZE,
(void* )NULL,
(UBaseType_t )LCD_TASK_PRIO,
(TaskHandle_t* )&LCDTaskHandler);
ret=xTaskCreate((TaskFunction_t )TotalCountTaskFunc,
(const char* )"totaltask",
(uint16_t )TOTAL_COUNT_TASK_STK_SIZE,
(void* )NULL,
(UBaseType_t )TOTAL_COUNT_TASK_PRIO,
(TaskHandle_t* )&TotalCountTaskHandler);
ret=xTaskCreate((TaskFunction_t )SerialTaskFunc,
(const char* )"serialtask",
(uint16_t )SERIAL_TASK_STK_SIZE,
(void* )NULL,
(UBaseType_t )SERIAL_TASK_PRIO,
(TaskHandle_t* )&SerialTaskHandler);
vTaskStartScheduler();
}
各个任务函数
void LCDTaskFunc(void *pvParameters)
{
char string[21] = {0};
static uint8_t i=0;
for(;;)
{
i++;
sprintf(string, "%03d ", i);
printf("count :%d\r\n",i);
dis_string(1,0,(uint8_t *)string,1);
if(i==50)
{
xTaskNotifyGive(TotalCountTaskHandler);
i=0;
}
vTaskDelay(500); //延时500ms,也就是500个时钟节拍
}
}
void TotalCountTaskFunc(void *pvParameters)
{
static uint32_t i=0;
uint32_t tasknotifyvalue;
for(;;)
{
tasknotifyvalue= ulTaskNotifyTake( pdTRUE, portMAX_DELAY );
if(tasknotifyvalue)
{
i++;
printf(" total :%d\r\n",i);
}
else
{
vTaskDelay(10);
}
}
}
void SerialTaskFunc(void *pvParameters)
{
uint32_t tasknotifyvalue;
for(;;)
{
tasknotifyvalue= ulTaskNotifyTake( pdTRUE, portMAX_DELAY );
if(tasknotifyvalue)
{
printf("serial:%s",SerialFrame.Buff);
memset(SerialFrame.Buff,0,255);
SerialFrame.Len=0;
}
else
{
vTaskDelay(10);
}
}
}
串口中断
void USART1_IRQHandler( void )
{
BaseType_t pxHigherPriorityTaskWoken=pdFALSE;
//幅度有限,省略部分代码,仅列出主要代码
if(RESET != __HAL_UART_GET_FLAG(&UartHandle,UART_FLAG_IDLE))
{
__HAL_UART_CLEAR_IDLEFLAG(&UartHandle);
/*任务通知用作二值信号量*/
vTaskNotifyGiveFromISR( SerialTaskHandler, &pxHigherPriorityTaskWoken );
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
}
}
运行结果
?
cs