Edge Boxes: Locating Object Proposals from Edges
C. Lawrence Zitnick and Piotr Doll��ar
Microsoft Research
Abstract:�����һ�����ñ߽�������������㷨,����ͨ����ס������,���Լ����������ĸ����������ķ�������,��������߽���غϸ��ʴﵽ0.7ʱ,������ٻ��ʳ���75%,����֮��,�㷨�ļ����ٶȺܿ�,Լ��0.25��,���һ����Խ���С������ʧ��ʵʱ�ı仯��
1Introduction:
Ŀ�����Ŀ�����Ҫȷ��һ��ͼ�����Ƿ����Ҫ�������塣�����������,ʮ����ǰ���㷨�����û������ڵķ���,��ÿ������,ÿ���߶�,���е����������ࡣ���,����һ�ֿ�ܱ����,�ÿ��������˳߶Ⱥͷ���IJ�ȡ����,�������ñ߽���Ŀ���ⷽ��,���������������صľ�ȷ�ļ�������(���Բ���������Χ�������������),��2013ͼ����������ս��PASCAL VOC���ݼ���,��������ǻ�ʤ�ߡ�
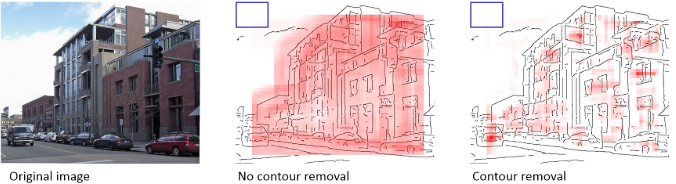
����ƪ������,�����һ�ָ��ݱ�Ե�����Ŀ����㷨,��ָ�����,Ҳ��Ҫ�õ�ͼ��ı�Եӳ��,֮���ٴ�ӳ���м��Ŀ�ꡣ������˵����:ͨ���߽�����Ŀ��Ŀ����Ը���(�߽��ķ���)����ΪĿ�����һ��ָ��,������еı�Ե���ض����ڱ߽���ڲ��������ߵĻ�,��ô�Ϳ��Եó�:���������߽���ˡ��ڽ���Ŀ����֮ǰ,�������ýṹ��Ե�����( Structured forests for fast edge detection/Fast edge detection using structured forests)���б�Եӳ��Ļ�ȡ,�����������,Ϊ�˼��ټ���,���������ڵ����Ʒ�������ؽ��о���������顣�������ô�ͳ�ķ�����ÿһ��DZ�ڵĶ���λ�á������߿�����,����һ������,����ʾһ��������ֵĿ�����,�Խ�һ���Ż��߽��
�����������һ�����ⷽ��:ͼ��ı�Ե�ӿ������Ϳ��ӻ����
����?ԭ��?(���о�����)
2Related work
��õ�Ŀ���ⷽ�����Դ��µķ�Ϊ����:1.ʹ�ø����Ұ���ķ������ͼ����;2.���ලѧϰ,ͨ�����ƺ�ѡ���������,�ڽ��ٵļල��ѧϰ��
�������������Ŀ����İ���:
1.�㷨����:
ͨ����һ���������н�ϴ�������������ѡ����,����ÿ���������һ������ġ������ԡ�����,���ҵ���������ĺ�ѡ�߽��
2.���ӷָ�:
�����ӵĶ������ʼ,Ϊÿһ����������ǰ��-�����ķָ�(��������Ҫ�ŵ������ɸ������ķָ���ģ,ȱ���Ǽ���ɱ���(ÿ��ͼ��ķ�������)
3.�������ں�:
ѡ���������ǻ��ڼ�����εij����طֲ�ָ�,��һֱ�ǹ㷺ʹ�õĸ߲�μ�ⷽ����
���ĵķ����ǵ�һ��ֱ�Ӵӱ�Ե�в���Ŀ��߽��ķ���,������������ǰ�ķ���,���IJ�û��ʹ�÷ָ������,Ҳ����Ҫѧϰ��������,�����ñ߽��������������
3Approach
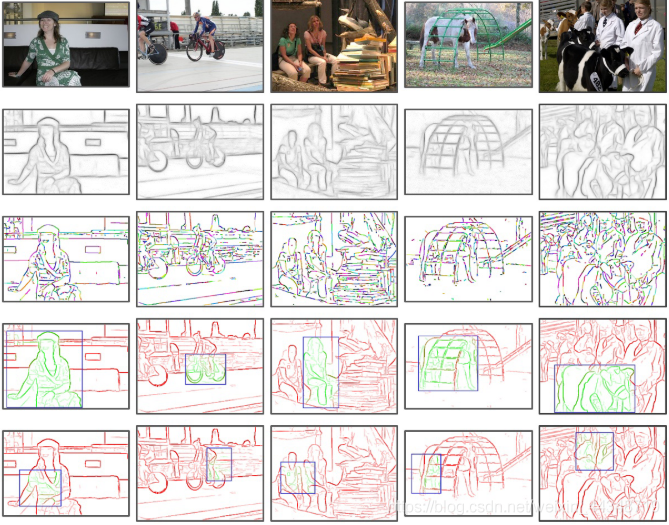
�����������ҵ�Ŀ�����ķ�����Ŀ������ǻ��ڵ�һ������������еȼ����ֵġ�����,���ڱ�Ե�������������ݽṹ,Ȼ������ڱ�Ե�����ֺ���,���,ʹ�û������ڵĿ����Ѱ�Ҹߵȼ���Ŀ�����,���մֵ�ϸ������ϸ�����п�λ�á������߿��ȵ�����(��ط������������ƫ��)��
����һ��ͼ��,����ʹ�ýṹ��Ե�����������ÿ�����صı�Ե��Ӧ,���õ�һ�߶ȱ仯�ͼ�����ǿ����������ʱ��;Ȼ��,�Ա�Ե��Ӧ���÷Ǽ���ֵ������������ȥ�ҵ���Ե��ֵ;����ʹ�ü�̰���㷨���ɱ�Ե������(���8���ӵı�Ե,ֱ���������ܺͳ�����/2ֹͣ);Ȼ��,���ݹ�ʽ:

����ÿ�������������;����,�ɱ�Ե���鼯�Ϻ�����,������ʽ:
�����ѡ�߽���Ŀ�������,(Ϊ�˽��ͱ߽���м�ı�Ե����ڱ߽���ı�Ե����Ҫ��һ�۲�,��������Ĺ�ʽ������:
);Ȼ��,�ֱ���ˮƽ�ʹ�ֱ�߽�Ѱ�ҽ���㹹�����ݽṹ,�����ҵ��ص���Ե����б�;���ͨ��IoU(������)����ͨ��������������ͼ�е�ÿ��λ�õõ������
4Results
���ڽ��㷨�������㷨���бȽϡ���ͼΪ�㷨�ı���Ƚϡ�
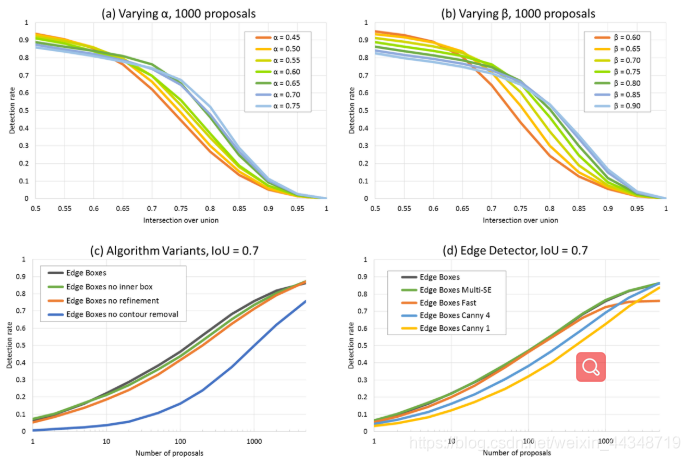
���Կ���ͼc�е����߱仯ͦ���,�������Ƴ����㷨������һ����Ӱ�졣
�������㷨��������ͬ�汾��ȷ�ȵĺ�����

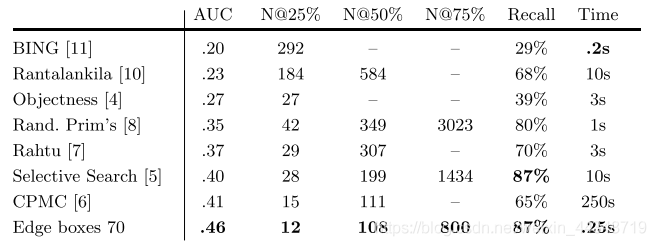
��ͼ�п��Կ���,���ݲ������õ�Edge boxes50��IoUΪ0.5ʱ��AUC(Area Under the Curve)��Recall��ߡ�
��ͼ�Dz�ͬ���������,�㷨�ıȽϡ�
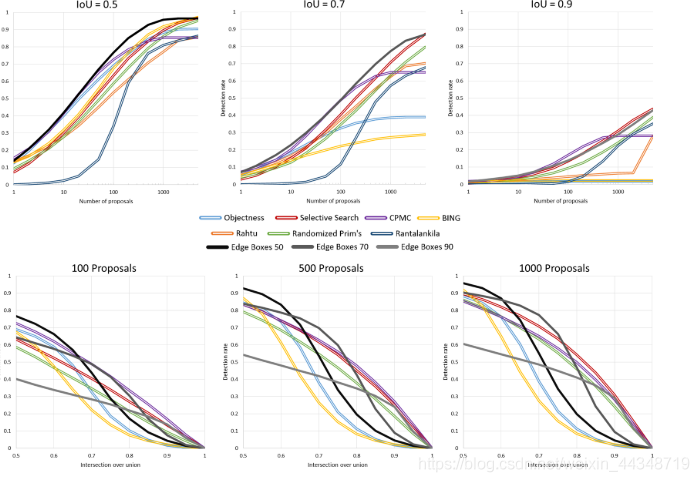
��ͼ�������㷨����������Ӧ���ᵽ,��Objectness , Selective Search��
��ͼ�Dz�ͬ�㷨�����ܶ����ıȽϡ�
5Discussion
�ڱ�����,�����һ����Ч�ķ�����Ѱ��ͼ���е�Ŀ�꽨��,��������һ���Ĺ۲�:��ȫ��һ���߽���Χ�ı�Ե�����������˸ñ߽�����һ��Ŀ��Ŀ����ԡ�������һ��ֱ�ӵ����ֺ���,������һ�����ڵı�Եǿ�ȼ�ȥ���ÿ�߽���������ֵ�ǿ�ȵļ�Ȩ�͡�������Ч�����ݽṹ��������������,���Կ����ҵ�Ŀ�꽨�顣�������,��Ŀǰ�ļ���ˮƽ�������ȷ�Ժ�Ч�ʡ�
δ���Ĺ�����,ʹ�ñ�Ե���������ɷָ��,���˱߽����Ķ����ڶ�һ����ѡ�߽����д��ʱ,ȥ�������;��Щ�����Ʊ�Ե��λ�ÿ���Ϊ�ָ�������ṩ���õ���Ϣ��
ѵ����ͼ��

Part Code ����.
������������Ƭ
% EDGES
% See also readme.txt
%
% Fast edge detector code is based on the paper:
% P. Doll�r and C. Zitnick
% "Structured Forests for Fast Edge Detection", ICCV 2013.
% Please cite the above paper if you end up using the edge detector.
%
% Edge Boxes object proposal generation is based on the paper:
% C. Zitnick and P. Doll�r
% "Edge Boxes: Locating Object Proposals from Edges", ECCV 2014.
% Please cite the above paper if you end up using the object proposals.
%
% Structured Edge detector code:
% edgesChns - Compute features for structured edge detection.
% edgesDemo - Demo for Structured Edge Detector (please see readme.txt first).
% edgesDemoRgbd - Demo for RGBD Structured Edge Detector (please see readme.txt first).
% edgesDetect - Detect edges in image.
% edgesSweeps - Parameter sweeps for structured edge detector.
% edgesTrain - Train structured edge detector.
%
% Edge detection evaluation code:
% edgesEval - Run and evaluate structured edge detector on BSDS500.
% edgesEvalDir - Calculate edge precision/recall results for directory of edge images.
% edgesEvalImg - Calculate edge precision/recall results for single edge image.
% edgesEvalPlot - Plot edge precision/recall results for directory of edge images.
%
% Edge Boxes object proposal generation code:
% edgeBoxes - Generate Edge Boxes object proposals in given image(s).
% edgeBoxesDemo - Demo for Edge Boxes (please see readme.txt first).
% edgeBoxesSweeps - Parameter sweeps for Edges Boxes object proposals.
%
% Object proposal evaluation code:
% boxesData - Get ground truth data for object proposal bounding box evaluation.
% boxesEval - Perform object proposal bounding box evaluation and plot results.
%
% Sticky Edge Adhesive Superpixel code:
% spDemo - Demo for Sticky Superpixels (please see readme.txt first).
% spDetect - Detect Sticky Superpixels in image.
% spAffinities - Compute superpixel affinities and optionally corresponding edge map.
% Demo for Structured Edge Detector (please see readme.txt first).
%% set opts for training (see edgesTrain.m)
opts=edgesTrain(); % default options (good settings)
opts.modelDir='models/'; % model will be in models/forest
opts.modelFnm='modelBsds'; % model name
opts.nPos=5e5; opts.nNeg=5e5; % decrease to speedup training
opts.useParfor=0; % parallelize if sufficient memory
%% train edge detector (~20m/8Gb per tree, proportional to nPos/nNeg)
tic, model=edgesTrain(opts); toc; % will load model if already trained
%% set detection parameters (can set after training)
model.opts.multiscale=0; % for top accuracy set multiscale=1
model.opts.sharpen=2; % for top speed set sharpen=0
model.opts.nTreesEval=4; % for top speed set nTreesEval=1
model.opts.nThreads=4; % max number threads for evaluation
model.opts.nms=0; % set to true to enable nms
%% evaluate edge detector on BSDS500 (see edgesEval.m)
if(0), edgesEval( model, 'show',1, 'name','' ); end
References
- Viola, P.A., Jones, M.J.: Robust real-time face detection. IJCV 57(2) (2004) 137�C154
- Dalal, N., Triggs, B.: Histograms of oriented gradients for human detection. In: CVPR. (2005)
- Felzenszwalb, P., Girshick, R., McAllester, D., Ramanan, D.: Object detection with discriminatively trained part based models. PAMI 32(9) (2010) 1627�C1645
- Alexe, B., Deselaers, T., Ferrari, V.: Measuring the objectness of image windows. PAMI 34(11) (2012)
- Uijlings, J.R.R., van de Sande, K.E.A., Gevers, T., Smeulders, A.W.M.: Selective search for object recognition. IJCV (2013)
- Carreira, J., Sminchisescu, C.: Cpmc: Automatic object segmentation using constrained parametric min-cuts. PAMI 34(7) (2012) 7. Rahtu, E., Kannala, J., Blaschko, M.: Learning a category independent object detection cascade. In: ICCV. (2011) 8. Manen, S., Guillaumin, M., Van Gool, L., Leuven, K.: Prime object proposals with randomized prims algorithm. In: ICCV. (2013) 9. Endres, I., Hoiem, D.: Category-independent object proposals with diverse ranking. PAMI (2014) 10. Rantalankila, P., Kannala, J., Rahtu, E.: Generating object segmentation proposals using global and local search. In: CVPR. (2014) 11. Cheng, M.M., Zhang, Z., Lin, W.Y., Torr, P.: BING: Binarized normed gradients for objectness estimation at 300fps. In: CVPR. (2014) 12. Wang, X., Yang, M., Zhu, S., Lin, Y.: Regionlets for generic object detection. In: ICCV. (2013) 13. Girshick, R.B., Donahue, J., Darrell, T., Malik, J.: Rich feature hierarchies for accurate object detection and semantic segmentation. In: CVPR. (2014) 14. Deng, J., Dong, W., Socher, R., Li, L.J., Li, K., Fei-Fei, L.: Imagenet: A large-scale hierarchical image database. In: CVPR. (2009) 15. Everingham, M., Van Gool, L., Williams, C.K.I., Winn, J., Zisserman, A.: The pascal visual object classes (voc) challenge. IJCV 88(2) (2010) 303�C338 16. Doll��ar, P., Zitnick, C.L.: Structured forests for fast edge detection. In: ICCV. (2013) 17. Marr, D.: Vision: A computational investigation into the human representation and processing of visual information. Inc., New York, NY (1982) 18. Eitz, M., Hays, J., Alexa, M.: How do humans sketch objects? ACM Transactions Graphics 31(4) (2012) 19. Doll��ar, P., Zitnick, C.L.: Fast edge detection using structured forests. CoRR abs/1406.5549 (2014) 20. Deselaers, T., Alexe, B., Ferrari, V.: Localizing objects while learning their appearance. In: ECCV. (2010) 21. Siva, P., Xiang, T.: Weakly supervised object detector learning with model drift detection. In: ICCV. (2011) 22. Gu, C., Lim, J.J., Arbel��aez, P., Malik, J.: Recognition using regions. In: CVPR. (2009)
- Siva, P., Xiang, T.: Weakly supervised object detector learning with model drift detection. In: ICCV. (2011)
- Gu, C., Lim, J.J., Arbel��aez, P., Malik, J.: Recognition using regions. In: CVPR. (2009)
- Hoiem, D., Efros, A.A., Hebert, M.: Geometric context from a single image. In: ICCV. (2005)
- Russell, B.C., Freeman, W.T., Efros, A.A., Sivic, J., Zisserman, A.: Using multiple segmentations to discover objects and their extent in image collections. In: CVPR. (2006)
- Malisiewicz, T., Efros, A.A.: Improving spatial support for objects via multiple segmentations. In: BMVC. (2007)
- Hosang, J., Benenson, R., Schiele, B.: How good are detection proposals, really? In: BMVC. (2014)
- Felzenszwalb, P.F., Huttenlocher, D.P.: Efficient graph-based image segmentation. IJCV 59(2) (2004)
- Canny, J.: A computational approach to edge detection. PAMI (6) (1986) 679�C698
cs